

助力中国制造升级!中科深谷全新一代开源高精度 SCARA机器人正式发布!
发布日期:2023-08-07 浏览次数:2645
PART 01 背景
新能源、汽车电子、锂电池、物流、食品等是当今的热门产业,在这些行业的产线上,SCARA机器人往往承担着装配、搬运、分拣、点胶、涂覆、锁附、插件、贴标等重要的工作。“热门”之下,效率、质量才是立于不败之地的根本。
SCARA机器人是一种工业机器人,主要用于拾取和放置操作,装配任务和其他高速,高精度应用。它们采用独特的“肩部”和“肘部”关节配置设计,可实现更大的运动范围和灵活性。
PART 02 解决方案
为了满足这些需求,中科深谷推出全新一代开源高精度 SCARA机器人,为高精度加工带来效率飞升,助力中国智能制造升级!开源高精度 SCARA机器人适用于自动上下料、组装、装配等场景,为客户提供稳定可靠的自动化解决方案。可以支持拖动示教、碰撞保护、自适应控制、运动学正逆解等算法。
开源高精度 SCARA机器人系统是由SCARA本体、驱动系统、控制系统、人机交互软件和稳压电源组成。控制系统采用国际上先进的基于模型设计(MBD:Model-Based Design)的开发方法,并基于MATLAB/Simulink 和TI TMS320F28335 DSP 芯片架构进行开发。驱动系统通过C代码开发实现交流伺服电机的电流(FOC磁场定向控制)、速度、位置三闭环(PID)的驱动控制算法。
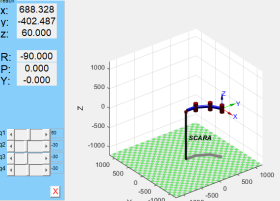
图|桌面型SCARA仿真
 图|桌面型SACRA运动学控制
图|桌面型SACRA运动学控制
 图|零力拖动
图|零力拖动
PART 03 技术优势与支撑科研
实现技术
01
±0.05mm的重复定位精度,确保了应用产线的制造工艺得以最优呈现,保证精密产品的组装质量。
02
支持TCP/IP、TCP Modbus、CAN、EtherCAT等多种总线,实现更高的扩展性,支持机器人与系统之间的互联互通。多种安装方式,满足不同应用现场的空间要求。
03
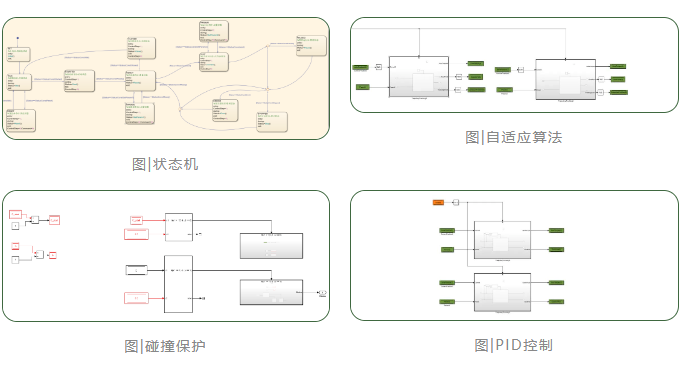
支持运动学正解、逆解算法,动力学零力拖动、碰撞保护、自适应算法等控制算法的研究。提供交流伺服驱动器的电流、速度、位置三闭环的伺服控制方法、以及梯形加减速、CAN总线通讯等运动控制算法。
04
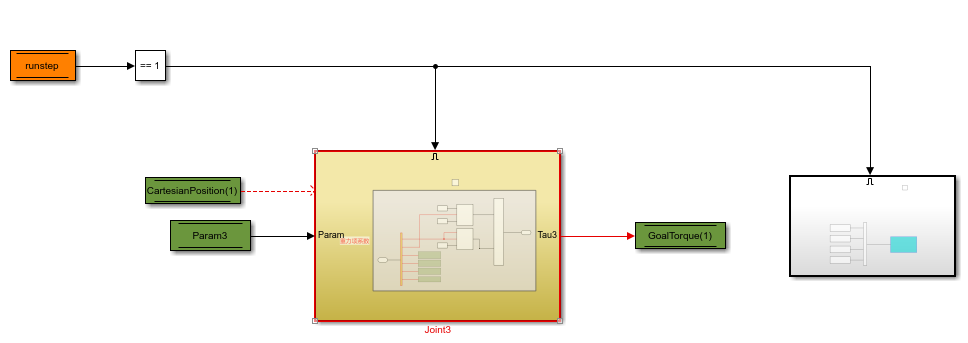
“做得好”更要“看得见”,开源高精度SCARA机器人系统基于TI DSP嵌入式和MATLAB/Simulink软件开发,在Simulink中进行模块化编程实现机械臂控制,验证各种算法,自动生成代码。
05
在开源高精度SCARA机器人的开发过程中,开发人员紧紧围绕“高速高精”以及由此带来的“更高可靠性”的诉求,不断优化结构设计,优化算法,并定制扭矩更大、转速更高的减速机,选配最适配的马达,确保机器人在高速运行时的刚性进一步提升,克服振动更稳定,运行轨迹更柔顺,呈现高精度加工工艺。
支撑科研
1. 高精度轨迹跟踪控制算法研究
2. 动力学参数辨识
3. 碰撞检测保护
4. 拖动示教
5. 柔顺控制
6. 高级自动控制算法
7. 路径规划和轨迹规划
8. 柔性机械臂运动学参数标定与精度补偿技术研究
SCARA机器人作为制造行业应用的最为广泛的机器人之一,随着新能源、汽车电子、锂电池等行业的繁荣,增长速度一路飙升,又因传统加工制造行业由劳动密集型向技术密集型方向转移,在电子、家电制造行业中大批量投入使用,SCARA机器人的出现,极大的帮助了企业降低成本提高效益。
未来,中科深谷将持续研发创新,在机器人的基础上,进一步整合其在工业等产业自动化领域的深厚能力,为用户提供定制化、智能化解决方案,并将工业等产业装备的硬件、软件、算法等开源开放出来,秉持开源开放、技术创新,产学研用通力融合,努力推动人工智能·机器人技术的高速发展及产业应用。


