

开源下肢外骨骼机器人系统
发布日期:2023-09-18 浏览次数:2071
产品概述
开源下肢外骨骼机器人系统以提升康复行业智能产业的技术水平和先进性,推动智慧康复为愿景,以医疗产业的高度智能化发展为使命,鼓励创新,激励创造,矢志不渝的致力于机器人在康复领域的应用,努力成为世界领先的康复机器人产业平台。
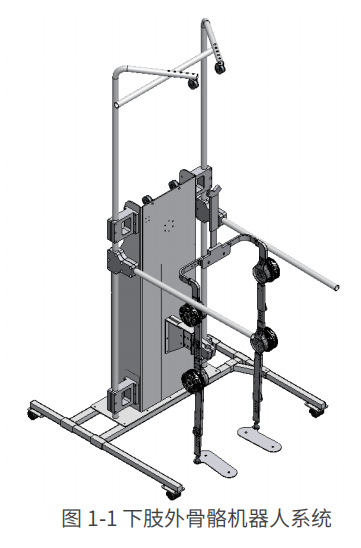
该系统由下肢外骨骼机器人本体、控制系统、上位机软件和稳压电源组成。每个主动关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。
该系统既可以作为自动化专业、机器人专业、机械电子专业、智能制造专业、机械工程专业中《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人伺服驱动技术》、《机器人机电一体化技术》、《机器人操作系统》、《机器人建模与仿真》等课程的配套实验实践平台,也同时支撑相关专业和课程的运动学、动力学及伺服驱动算法的教学和科研。
平台特色
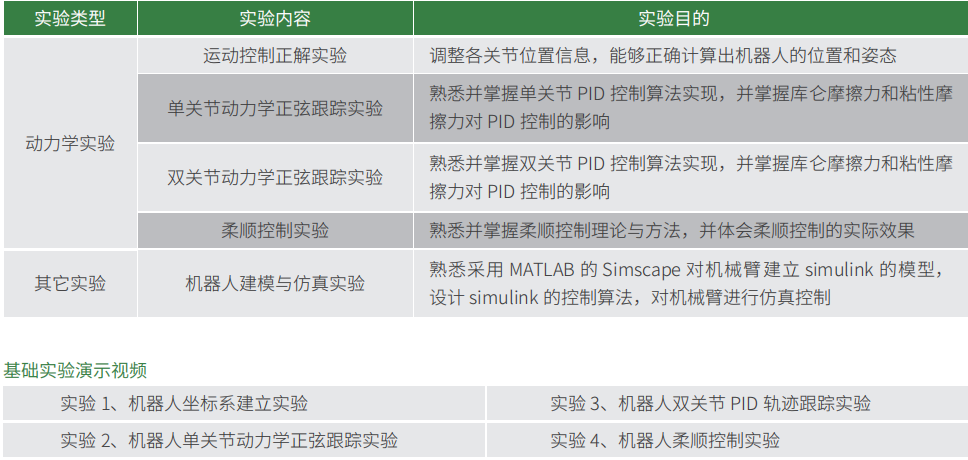
(1)开源成熟关节模组为实验载体,支撑机器人建模仿真、机器人运动学及控制,以及科研领域的算法验证实验和柔顺控制等高级应用的控制实验等;
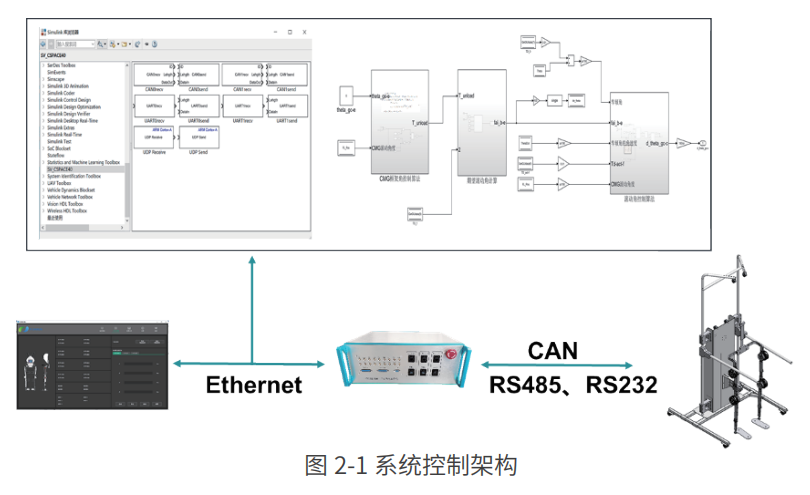
(2)控制器采用CSPACE进行开发,基于CAN总线通讯,控制器硬件基于ARM Cortex-A55或更高级别的主处理器,性能优良,运算能力强,支持 Matlab/Simulink 软件进行编程和自动代码生成,可以更高效地研究高级自动控制算法;
(3)单关节模组伺服驱动器自主开发,性能优异,开放电流、速度、位置三环控制,支撑高级动力学算法研究;
(4)提供丰富的应用场景:被动跟随康复训练,主动柔顺控制,行走康复训练,定制步态轨迹进行训练等;
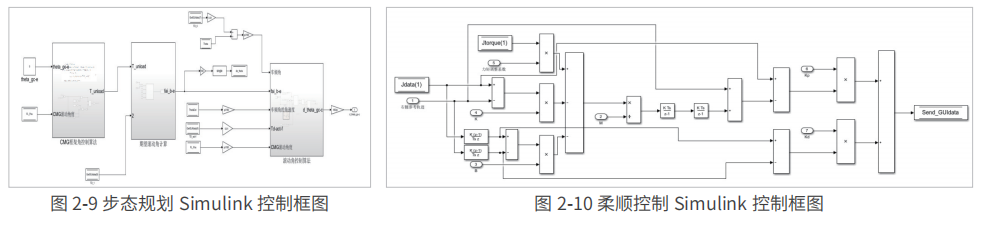
(5)提供丰富的仿真分析和开源算法:机器人工具箱运动学仿真、Simscape物理联合仿真、PID控制、柔顺控制算法等。
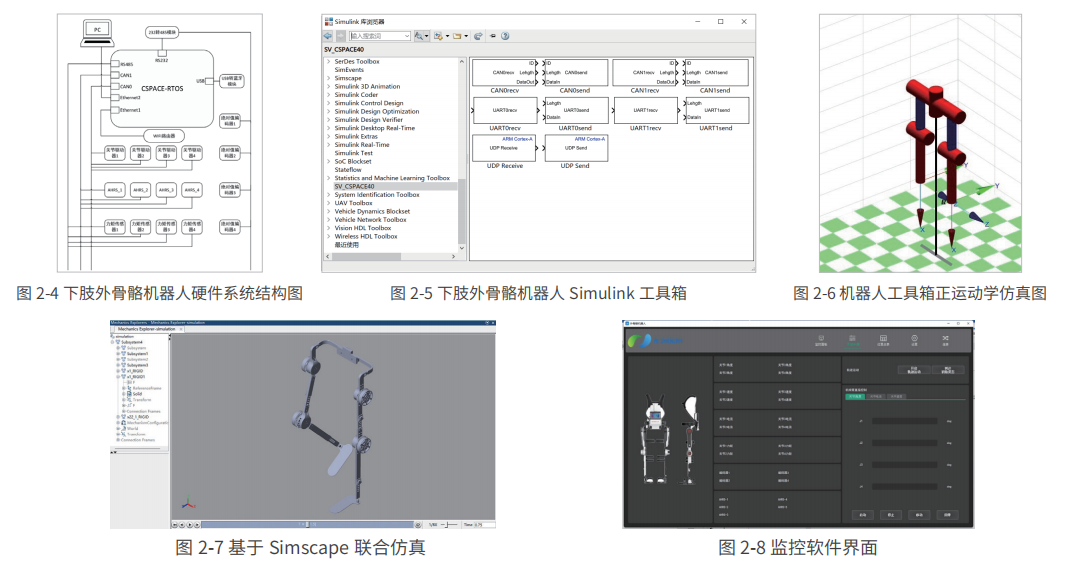
实验平台硬件组成
开源下肢外骨骼机器人系统主要部件和连接关系如下图所示,分为控制系统和执行系统两部分。

外骨骼本体
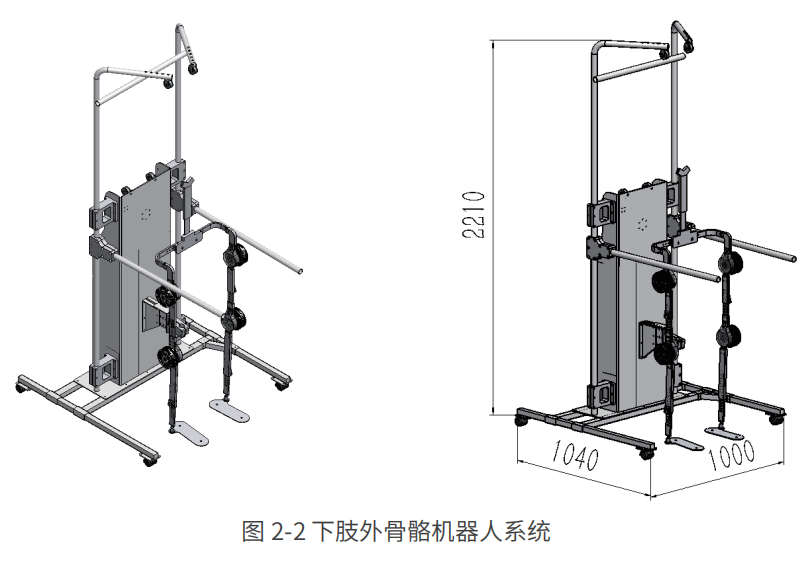
外骨骼本体采用人体美学设计,注重人的形态学特征,上身体验效果极佳,主要技术参数如表 1 所示。其中关节模组采用CAN总线,具有高度集成、高精控制、结构紧凑、响应快速等特点。

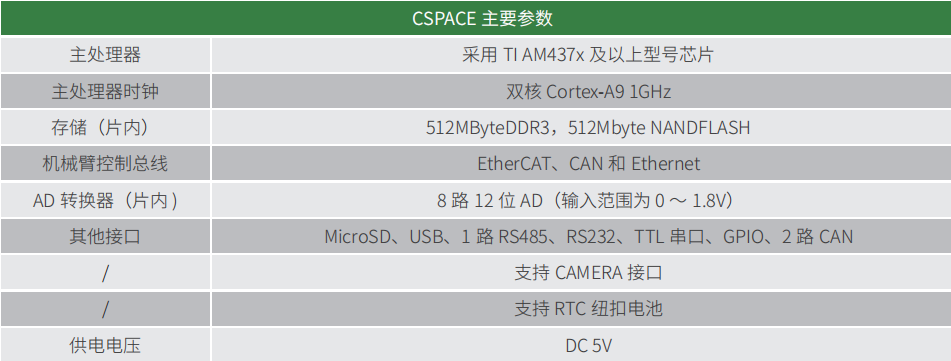
CSPACE控制器
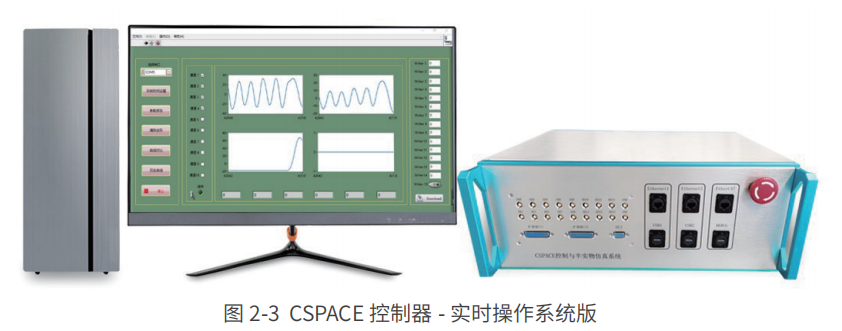
CSPACE 控制与半实物仿真系统是基于高性能 ARM Cortex-A 系列处理器架构和 MATLAB/Simulink 开发。外设接口丰富,板载实时操作系统,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。CSPACE 控制器如图3所示,是可对标国际先进的控制与半实物仿真领域的产品。
实验内容一览
支撑的教育科研

- 上一篇:类人形机器人教学科研平台
- 下一篇:开源两关节助行机器人(髋部)


