

开源六轴协作机器人打磨工作站
发布日期:2023-09-19 浏览次数:1964
产品概述
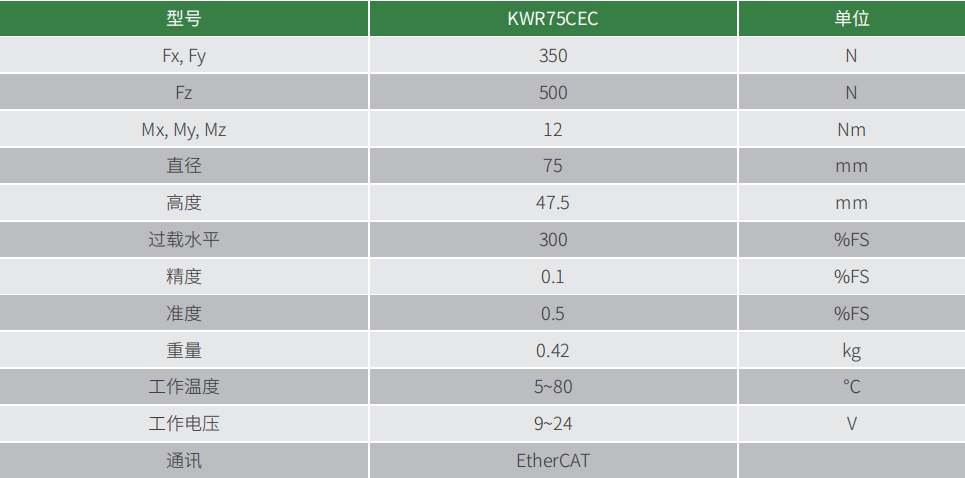
为更好地赋能机械臂的研究和产业化,公司推出自主研发的开源智能六轴协作机器人打磨工作站,核心运动控制系统和伺服驱动器全自主开发。末端装有六维力传感器,配套有上位机监控软件,可实时修改控制参数、监控机械臂的参数,不仅方便教学,还能为深层次的协作机械臂或相关的机器人科研提供研发平台。
开源六轴协作机器人打磨工作站是基于 CSPACE 控制系统和 MATLAB/Simulink 开发的教科研平台。其由机械臂本体(6 个机械臂关节及其连杆和底座)、控制系统、打磨件、打磨头、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。
产品特点
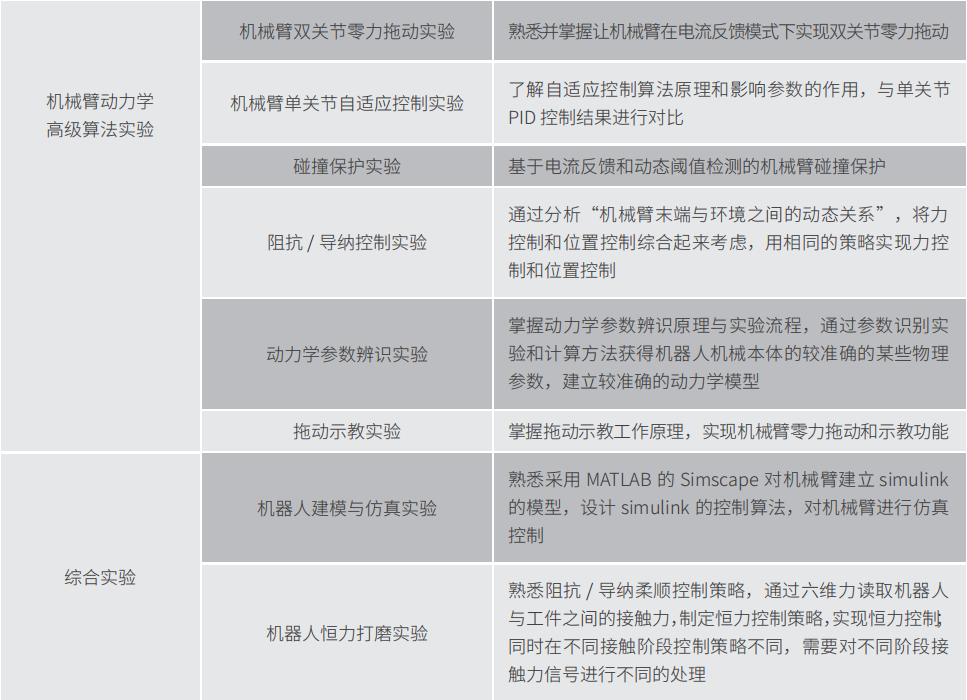
(1)开源成熟工业机械臂产品为实验载体,支撑机器人建模仿真、机器人运动学及控制、机器人动力学及控制等教学实验,以及科研领域的算法验证实验和打磨等高级应用的控制实验等;
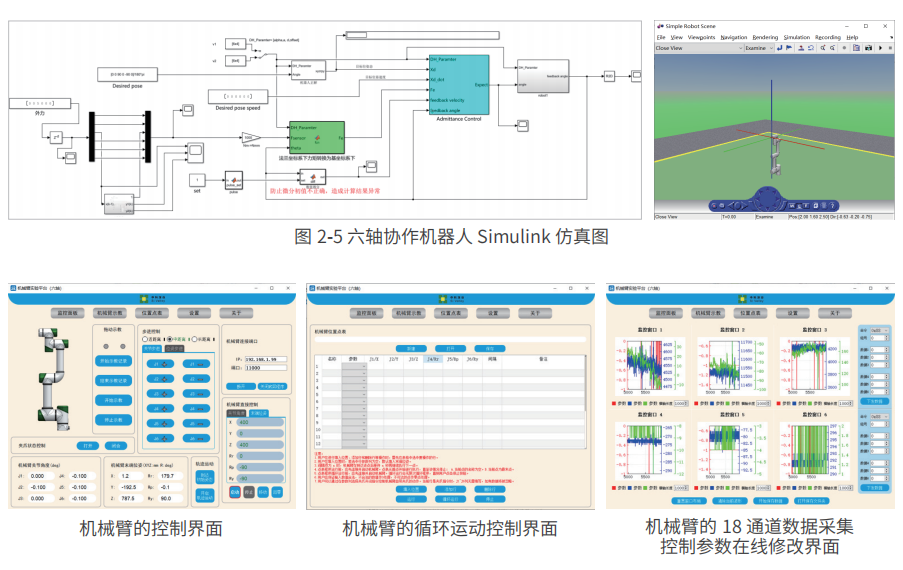
(2)控制器采用 CSPACE 进行开发,提供 EtherCAT 或 CAN 总线通讯接口可供选型,控制周期可以小到 1ms。CSPACE 操作系统版硬件基于 ARM Cortex-A9,性能优良,运算能力强,采用 Matlab/Simulink 软件进行编程开发,可以更好更快地研究高级自动控制算法;
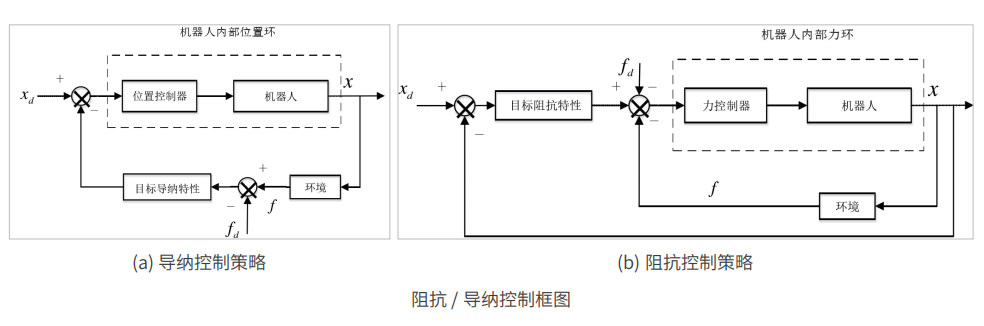
(3)提供柔顺控制开源算法,包括柔顺控制基础知识和实验,基于位置和阻抗 / 导纳控制算法,柔顺拖动算法,参数辨识,恒力控制,最速微分跟踪控制器等实验;
(4)完善的系统开放性及定制能力,丰富的软硬件接口,支持 EtherCAT、CAN、Ethernet 等多种通讯方式采用研究人员自主的控制系统进行控制,也可以用系统自带的 Simulink 和 ROS 进行系统的开发;
(5)提供丰富的应用场景:单臂操作,柔顺控制,力控装配,智能示教,柔顺拖动等;
(6)采用高精度六维力传感器,支持高级动力学、系统代码开源。
实验平台
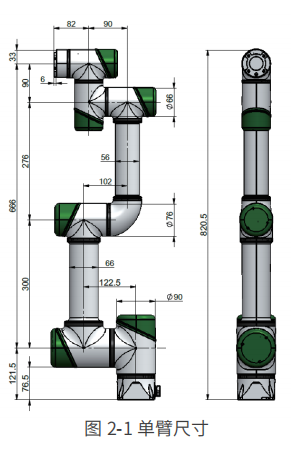
机械臂本体
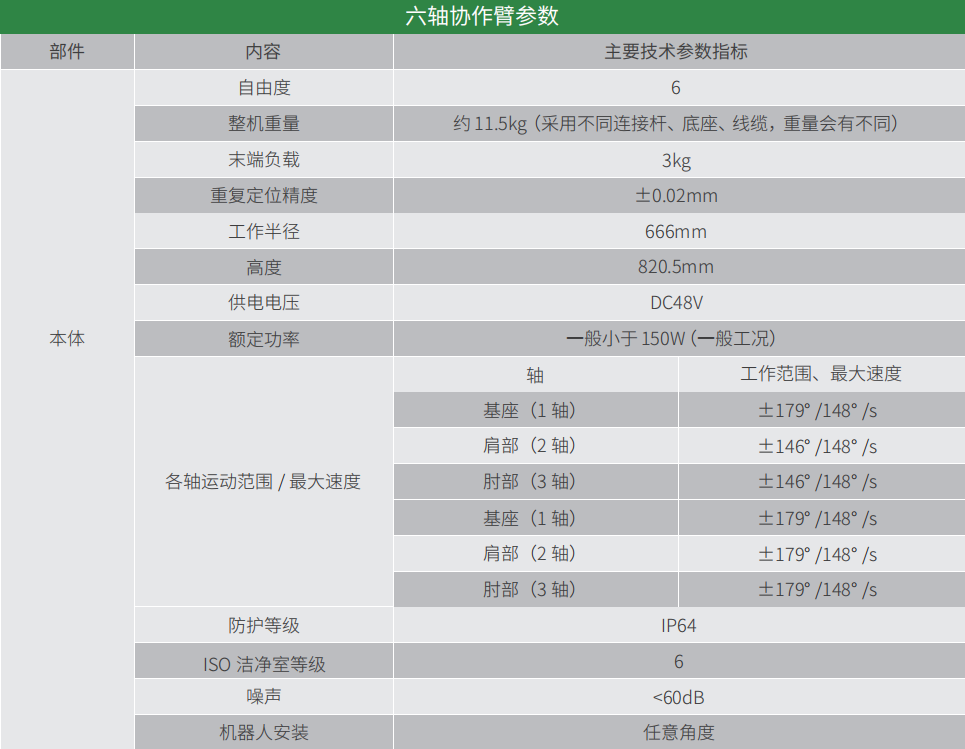
协作机械臂本体技术参数如表1所示,本体为六自由度,额定负载3Kg,最大工作半径 666mm,本体自重 11.5Kg,结构紧凑,易于安装。机械臂具有碰撞保护功能,工作安全适合人机协同的场合。机械臂关节模组采用智能集成化设计,将谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器、驱动器等集成一体,每个机器人关节通过EtherCAT总线组网。
CSPACE控制器
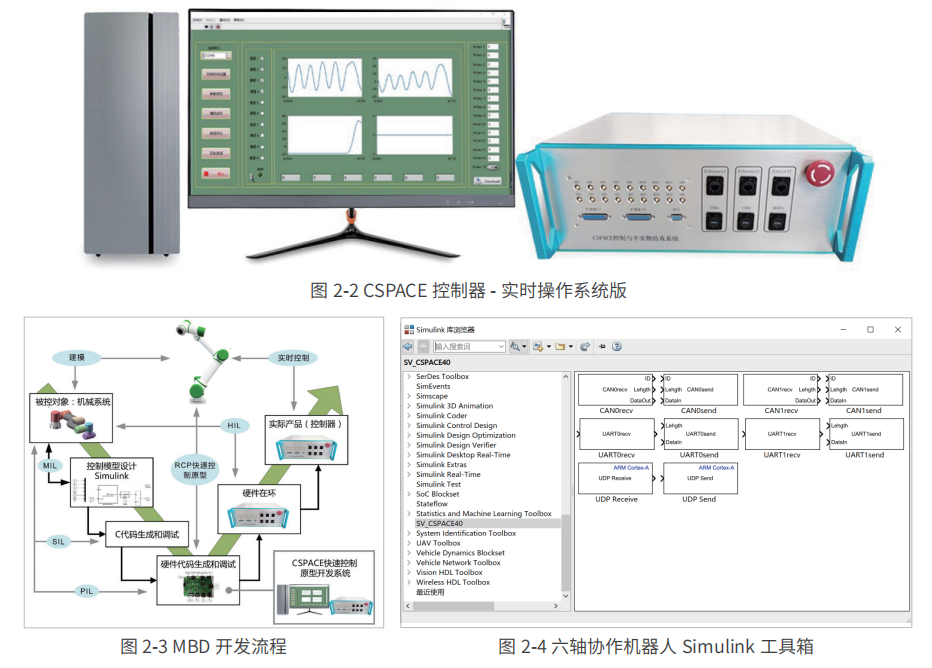
该平台控制系统采用 CSPACE 控制与半实物仿真系统操作系统版,基于 x86 硬件架构和 MATLAB/Simulink 联合开发。硬件外设接口丰富,并配有一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-BasedDesign)控制系统开发的教学和科研产品。CSPACE 控制器如下图所示,是可对标国际先进的控制与半实物仿真领域的产品。
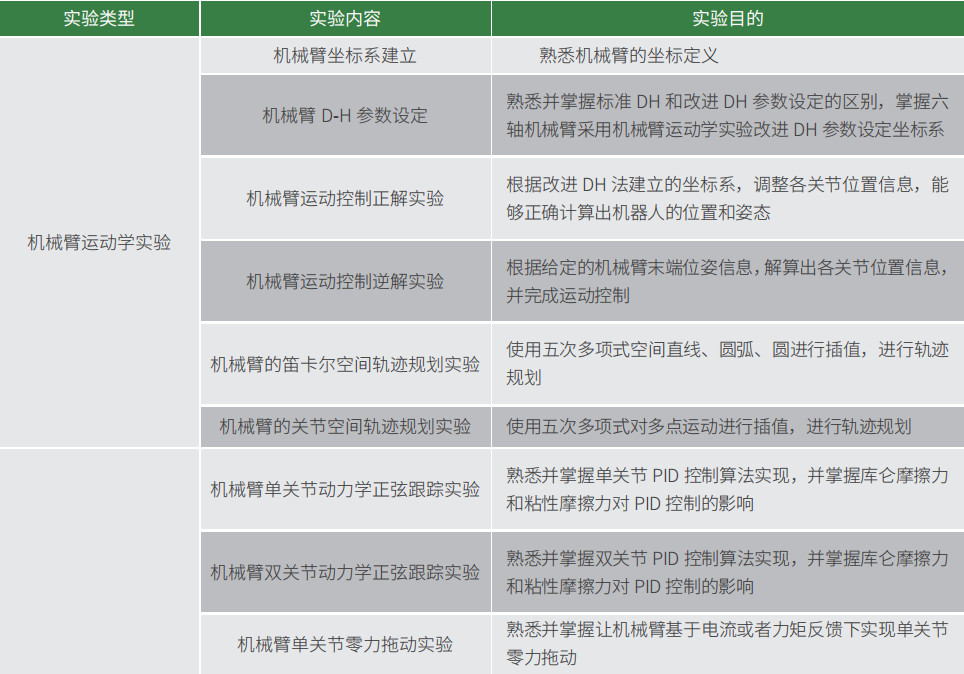
六维力传感器
实验内容一览

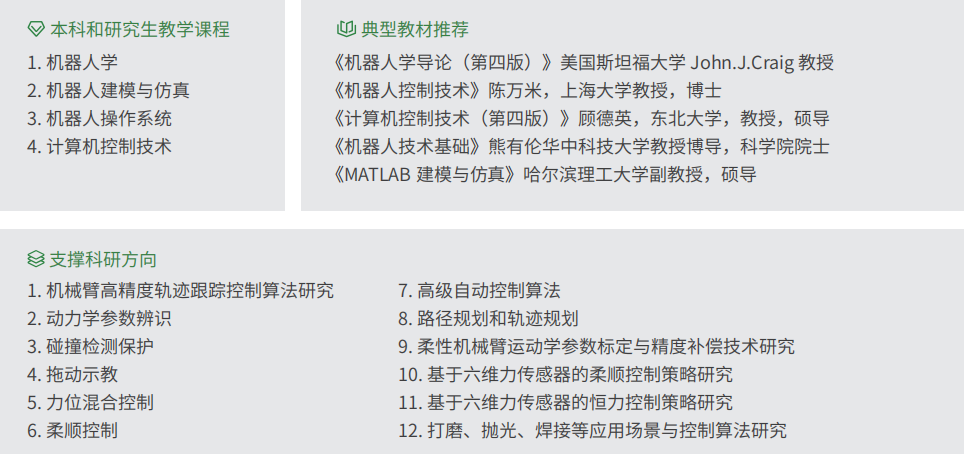
支撑的教学科研
- 上一篇:基于 ROS 的机械臂视觉分拣作业平台
- 下一篇:开源按摩理疗机器人


