

开源自动扎钢筋平台
发布日期:2023-09-22 浏览次数:1963
产品概述
自动扎钢筋平台是针对传统建筑行业中,需要大量人工进行手动钢筋捆扎的问题,所开发的一款平台。该平台模拟了钢筋捆扎的整个流程,由钢筋捆扎台、移动底盘、六自由度协作机械臂、自动钢筋捆扎工具及视觉定位系统组成。移动底盘到达钢筋捆扎台前,根据视觉定位系统,自动识别钢筋台上要捆扎的钢筋交叉点,再通过协作臂和自动钢筋捆扎工具实现对钢筋交叉点的全自动捆扎。
平台还提供了底层电机的驱动控制设计、移动机器人导航定位研究、机械臂的运动学和动力学研究、机器视觉开发、5G 远程通信应用等技术。平台支持采用 MATLAB/Simulink 和 ROS 联合开发,可支撑相关科研人员在该平台上进行深度学习、自动驾驶、机器人移动作业等人工智能的应用研究,是机器人工程专业建设、机器人科研、人工智能研究的教学、科研载体,也是面向室外作业、农业摘取、巡逻作业等产业应用的高级实验平台。

产品特点
(1)采用工业结构设计,核心器件符合工业标准,适合建筑场景应用;
(2)基于模块化设计,结构紧凑,功能丰富;
(3)模块均采用自主开源化的框架,可自由进行单独或融合算法研究;
(4)采用 MATLAB/Simulink 和 ROS 进行算法开发研究,能够适应大部分科研人员的研究基础;
(5)提供大量的 Demo 算法及实验案例,供用户在更深层次上的学习和研究;
(6)产品可进行二次开发,预留开发接口,提供全方位的技术支持;
(7)使用高性能计算机作为主控系统,满足大量数据的处理运算需求;
(8)也可用于自动驾驶、智能物流仓储、智能识别、安防巡检等领域的研究及应用。
平台参数
设备清单

机械臂本体
协作机械臂本体技术参数如图2所示,本体为六自由度,额定负载 3Kg,工作半径 626mm,本体自重 12Kg,结构紧凑,易于安装。机械臂关节模组采用智能集成化设计,将谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器、驱动器等集成一体,每个机器人关节通过 CAN 总线组网。
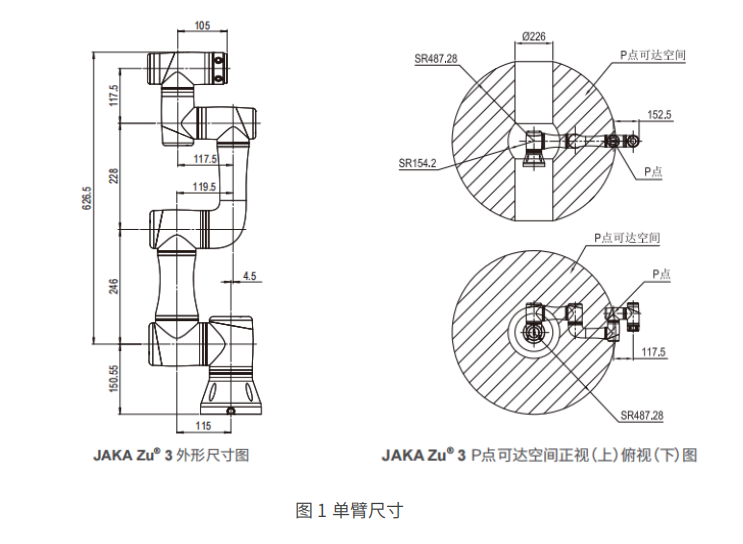
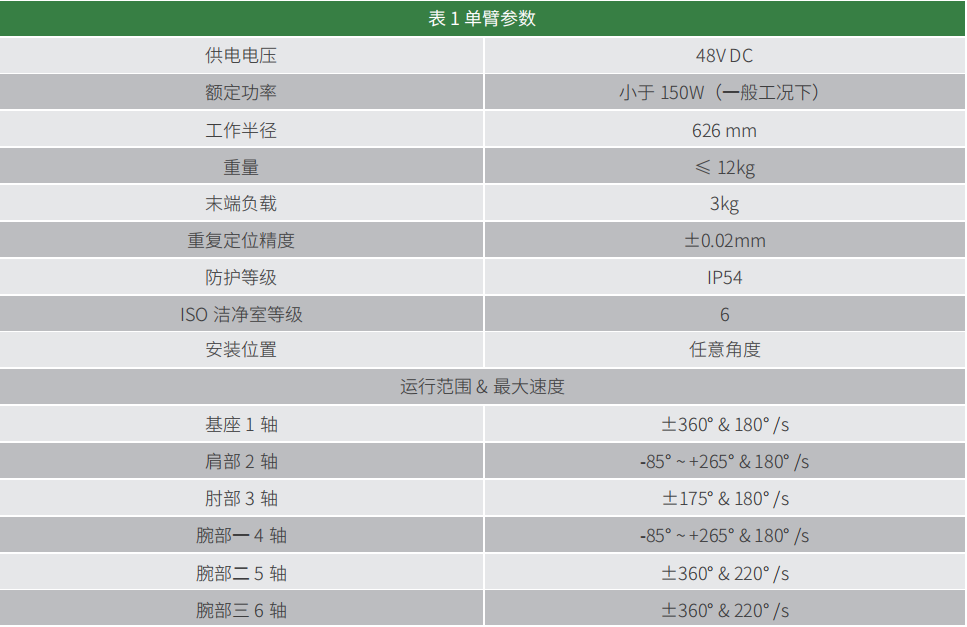
单臂参数
移动底盘
移动底盘使用我公司自主研发的重载底盘。该底盘采用四轮独立驱动、四轮差速转向的设计,并配合独立悬架。

绑扎工具
绑扎工具考虑如右图所示的电动手持式全自动扎钩绑扎工具。可提供该款产品的定制款,定制款会引出电源、控制和反馈信号。这些信号均可以接入到机械臂和底盘系统上。
机械臂末端集成该绑扎工具,通过视觉识别钢筋的交点位置,然后机械臂末端移动到相应位置,并发出绑扎信号,控制绑扎工具完成钢筋的绑扎工作。

绑扎工具

开源视觉系统
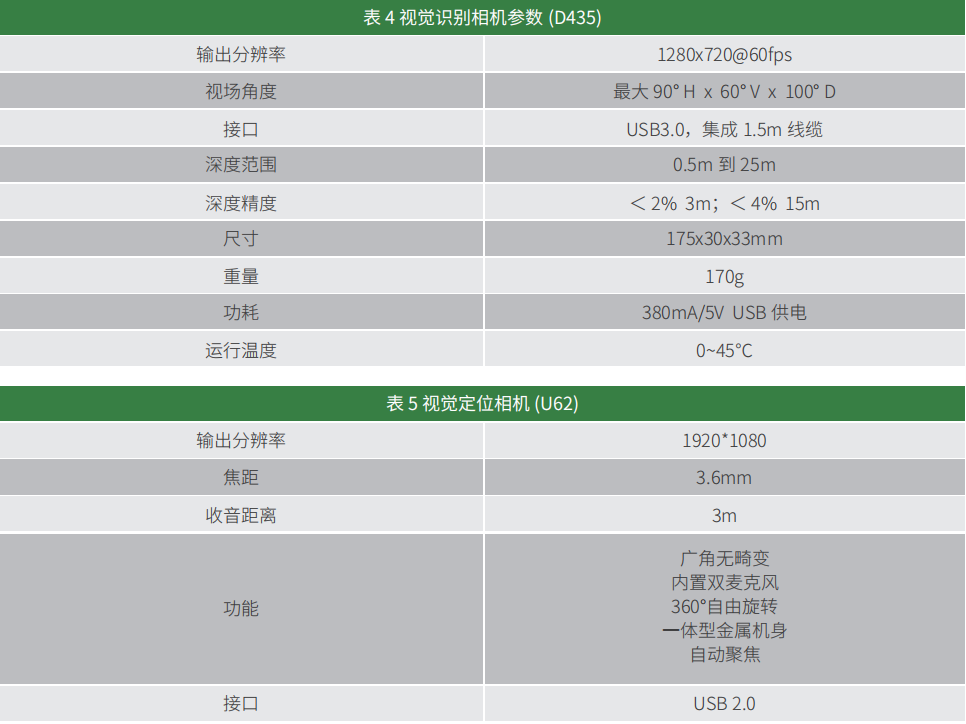
开源视觉系统使用因特尔RealSense D435深度相机和海康威视的U62相机。D435x相机提供了多种语言版本的SDK,算法上可使用开源的OpenCV库进行开发,能够满足该项目的教科研需求。
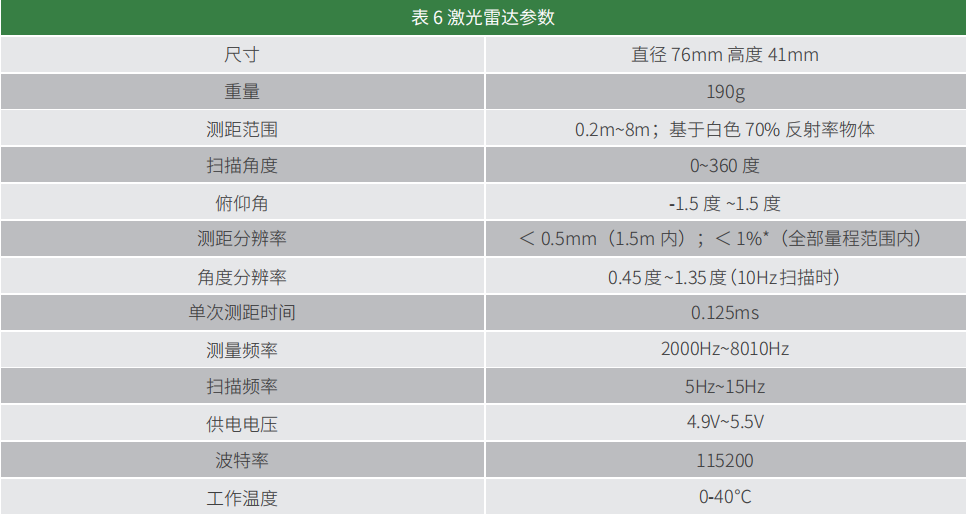
激光雷达
室内应用主要是使用 2D 单线激光雷达。使用思岚 A2 雷达,根据总控系统的操作系统类型,可使用思岚集成模块或基于ROS 的 SDK,能实现读取导航模块的数据,以实现建图、导航、定位等功能。定位精度可在 2cm 以内。
激光雷达参数
应用案例
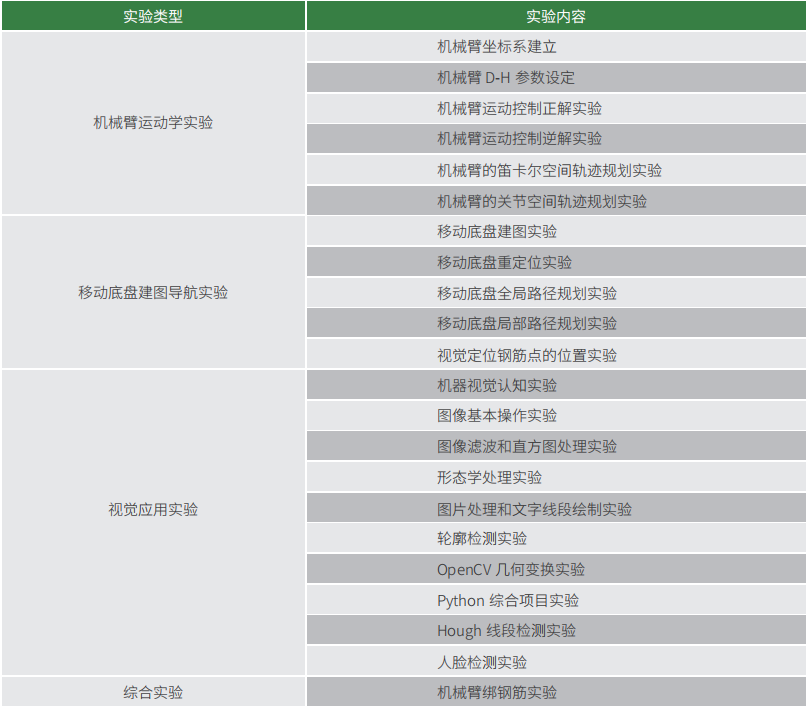
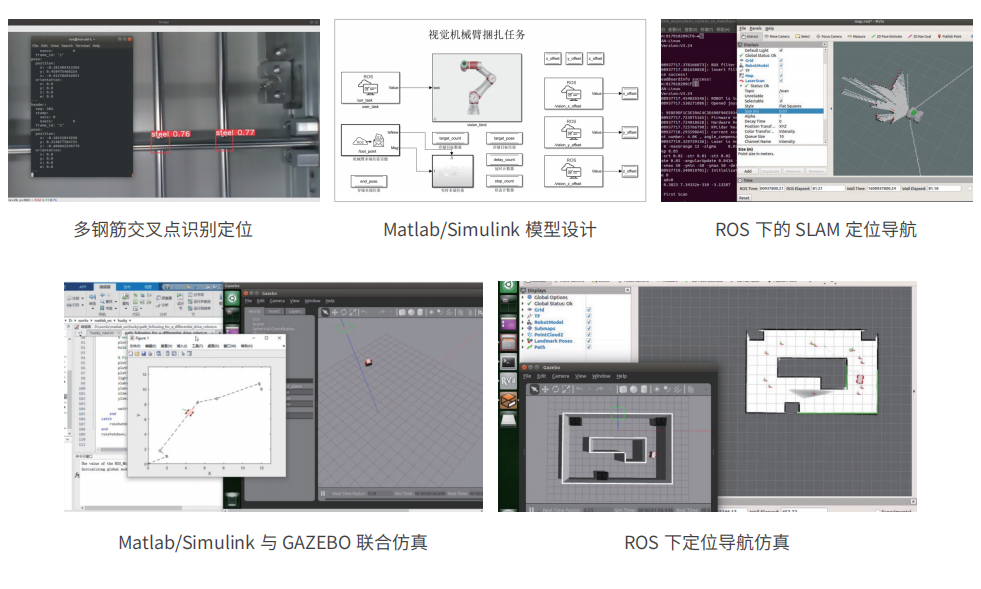 实验内容一览
实验内容一览
表7自动绑钢筋教科研平台实验项目
支撑的教学科研
支撑科研方向
(1)机械臂高精度轨迹跟踪控制算法研究
(2)路径规划和轨迹规划
(3)集成力传感器、视觉传感器、5G等,进行“机器人+”应用
(4)基于深度学习的机械臂高级运动控制与应用
(5)冗余自由度运动学
(6)仿真建模、半实物仿真
(7)机器人控制系统设计
(8)人工智能
(9)图像处理
(10)特征识别
(11)机器人视觉伺服设计、避障与路径规划
(12)激光定位导航、路径规划、避障检测
(13)5G通讯技术与应用
(14)远程控制与信息传输、信息融合
(15)危险作业、智能仓储物流、智能安防、智能建筑作业等
- 上一篇:智能机器人协作铺砖系统
- 下一篇:基于 ROS 的机械臂视觉分拣作业平台


