SCI期刊发表 | 深谷基于CSPACE的协作机器人平台赋能科研新成果
发布日期:2024-04-18 浏览次数:1512
在过去的几十年里,各种非线性系统动态控制算法被用于实现关节模块的精确运动控制。但是传统控制方法不能很好处理外部干扰和不确定性对控制性能的影响问题,而目前现代控制方法对硬件计算能力要求很高,难以在实际工程中应用。
为了让协作机器人实现更好的控制,中科深谷团队对协作机器人工作原理、控制原理等介绍及其控制系统设计进行了综述,并组建了一套基于CSPACE实时仿真控制系统的机械臂控制系统,将待测试控制器及部分实物与系统连接,动态检测系统整体指标。加快了系统搭建的开发进度,方便了系统运行时参数调整。该项研究以论文(协作机器人模块化关节控制)为题发表于2023年Journal of Intelligent & Robotic Systems 期刊中。

全文导读
——什么是鲁棒控制?
在实际控制系统中,被控对象的模型往往存在一定的不确定性,以自动驾驶的车辆为例,车内乘客或者货物的重量变化会造成被控系统的模型波动。该类经常存在的问题,对控制器的设计提出挑战,因此要求所设计的控制器具有充分的鲁棒性,以使得被控模型在一定范围内波动变化时,闭环控制性能都可以得到充分保证。
一种基于模型的鲁棒控制器(MBRC)
——研究思路
本文提出了一种基于模型的鲁棒控制器(MBRC),对外界干扰和系统不确定邢干扰具有较强的鲁棒性,并且控制成本低、结构简单、不需要高计算能力的处理器、参数易于调整、实用性强。
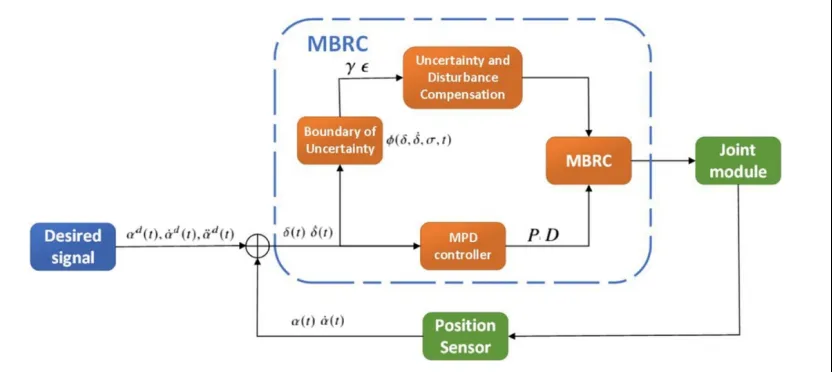
为了增强协作机器人关节模块的轨迹跟踪效果,提出了一种实用的基于模型的简单参数调整鲁棒控制方法:
01 首先,为了保持标称机械系统的稳定,利用动力学模型建立了标称控制器。
02 其次,利用Lyapunov方法建立鲁棒控制器,限制不确定性对动态性能的影响。通过理论分析,证明了该控制器能保证系统的一致有界性和一致极限有界性。此外,基于实际实验设备,设计了快速控制器CSPACE样机,可以快速重复实验,大大提高了实验效率。
03 最后,通过虚拟仿真和实验结果验证了该控制器的有效性和可实现性。
一种基于模型的鲁棒控制器(MBRC)
——工程应用价值
本文在动力学模型的基础上建立了标称控制器,采用李雅普诺夫方法建立了鲁棒控制器,以减小不确定性对系统性能的影响。通过理论分析,证明了MBRC能保证系统的一致有界性和一致极限有界性,显示了控制器的稳定性。在CSPACE样机的实验结果表明所设计的MBRC算法在动态轨迹跟踪实验中,跟踪性能良好。对负荷变化等不确定因素的影响具有较强的鲁棒性。

中科深谷设备科研价值
——CSPACE,协作机器人控制平台,半实物仿真

中科深谷设备作为控制系统的主控制器,支持快速控制原型(RCP),实现CSPACE系统代替传统嵌入式控制器,采用基于模型设计进行快速迭代。支持硬件在环回路(HIL),将待测试控制器及部分实物与系统连接,动态检测系统整体指标。加快了系统搭建的开发进度,方便了系统运行时参数调整。在开发过程中简化了硬件设计,不必考虑模数、数模转换电路的具体实现方式,可以更加专注于算法本身的实现。