

第43届中国控制会议 | 中科深谷与您相约昆明
发布日期:2024-07-27 浏览次数:1331
第43届中国控制会议(CCC 2024)

第43届中国控制会议(CCC 2024)将于2024年7月28-31日在昆明举办。中国控制会议由中国自动化学会控制理论专业委员(TCCT)发起,现已成为控制理论与技术领域的国际性学术会议。
会议旨在为系统、控制及自动化领域的国内外学者与技术人员提供一个学术交流平台,展示最新的理论与技术成果。会议采用大会报告、专题研讨会、发展论坛、会前专题讲座、分组报告和张贴论文等形式进行交流。会议的工作语言为中文和英文。会议英文论文会后将提交IEEE Xplore数据库。
7月28日至31日
昆明云安会都酒店
期待与您见面!
中科深谷受邀出席做会议专场报告
MATLAB&Simulink基于模型的设计在智能控制系统中的应用
7月30日下午,中科深谷联合中山大学、Mathworks中国在中国控制会议上带来精彩演讲,共同主办“MATLAB & Simulink 基于模型的设计在智能控制系统中的应用”专场研讨会。
01、中科深谷集团创始人、副总裁蒋荣慰受邀做“基于模型设计开发机器人智能装备的实战分享”
讲座摘要:本次讲座将分享基于模型设计自主研发的实时仿真控制系统(CSPACE)及其在机器人智能装备、深空探测装备、航空航天装备、人形机器人装备、新能源智能网联车等智能产品的研发与应用,分享产业案例赋能先进技术工程师培养的案例。


关键词:机器人智能装备、深空探测装备、航空航天装备、人形机器人装备、新能源智能网联车
讲座时间:7月30日下午 16:50-17:10
讲座地点:Room 2, 3rd Floor, Yunan Auditorium Conference (云安会都酒店三楼2号会议室)
02、中科深谷研发工程师李锐做“基于模型设计开发轮腿式机器人”分享
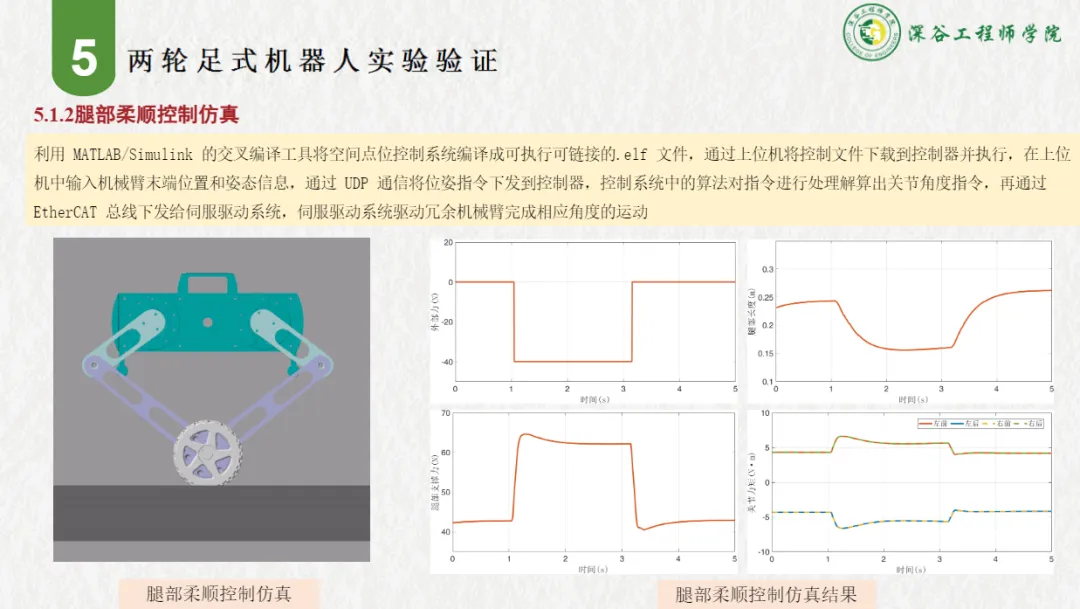
讲座摘要:伴随着工业应用场景的复杂化,传统的轮式移动机器人已经难以满足愈加复杂的应用场景,对轮足式移动机器人运动控制算法的研究也显得尤为的重要。为了解决上述问题,我们采用基于模型设计的方法开发两轮腿式机器人及控制系统,为了让轮腿式机器人运动平稳,具有较强鲁棒性,并发挥轮腿式机器人的特点,在运动灵活性以及避障方面展现出更好的性能,采用基于模型的鲁棒控制方法来实现轮腿式机器人的平衡和综合运动控制,并通过将虚拟模型控制与简化模型控制相结合,设计了基于相位切换的有限状态机跳跃运动控制方法,来发挥轮腿式机器人较强避障能力的特点。本次讲座中分享的案例是采用基于模型设计的开发方式,在Matlab\Simulink中搭建两轮腿式机器人运动控制系统,并在Simscape仿真环境和实物平台上进行了实验验证,验证两轮腿式机器人运动控制系统的整体功能和运动控制的准确性及运动控制算法的正确性。
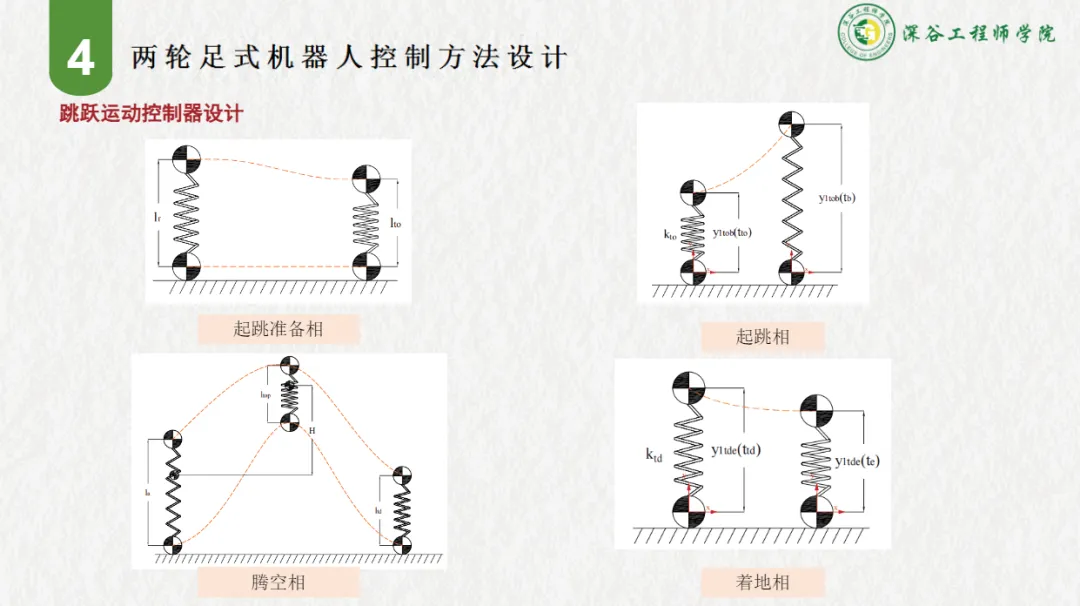
关键词:基于模型设计、轮腿式机器人、运动控制系统、基于模型的鲁棒控制、 跳跃运动控制
讲座时间:7月30日下午 17:10-17:30
讲座地点:Room 2, 3rd Floor, Yunan Auditorium Conference (云安会都酒店三楼2号会议室)


