SCI期刊发表 | 深谷基于CSPACE的工业协作机器人平台赋能科研新成果
发布日期:2024-05-13 浏览次数:1562
随着工业生产的快速发展,协同工业机器人越来越多地应用于工业生产。它们能够可靠、安全地完成复杂的任务,大大提高生产效率,降低工人的劳动强度。与标准的工业机器人相比,协作式工业机器人以其自己的小尺寸、高移动性和丰富的应用场景,填补了工业自动化领域的空白。协同工业机器人的灵活性远远超过标准工业机器人,在生产过程中更加灵活。因此,协同工业机器人具有广泛的应用前景和价值。
然而,在协同工业机器人中使用的关节减速器大多是具有灵活性的谐波减速器,这使得机器人的动态模型具有不确定性。同时,协同工业机器人是开环结构,在轨迹跟踪过程中容易发生振动。这将导致误差积累,降低了机器人的控制精度。当协同工业机器人与工人一起工作时,也会引入不确定的外部干扰,此时普通的PID控制不再能够满足需求。因此,如何实现协同工业机器人的高精度轨迹跟踪,提高系统处理不确定性的能力,已成为一个必须解决的问题。
为了实现协同工业机器人的高精度轨迹跟踪,提高系统处理不确定性的能力,中科深谷团队提出了一种新的基于模型的鲁棒控制方法来控制具有不确定性的复杂协同工业机器人系统。该项研究以论文(6-DOF协同工业机器人控制算法)为题发表于2022年Asian Journal of Control 期刊中。
全文导读——什么是机器人控制算法?
什么是六轴机器人?机器人控制算法是机器人技术发展的关键之一,随着技术的不断发展,机器人控制算法也在不断升级和改进。传统控制算法是机器人控制算法的基础,现代控制算法是传统控制算法的升级版,智能控制算法是一种融合机器学习、人工智能等技术的控制算法。在未来的发展中,机器人控制算法将更加智能化和自适应化,以适应不断变化的机器人控制任务。
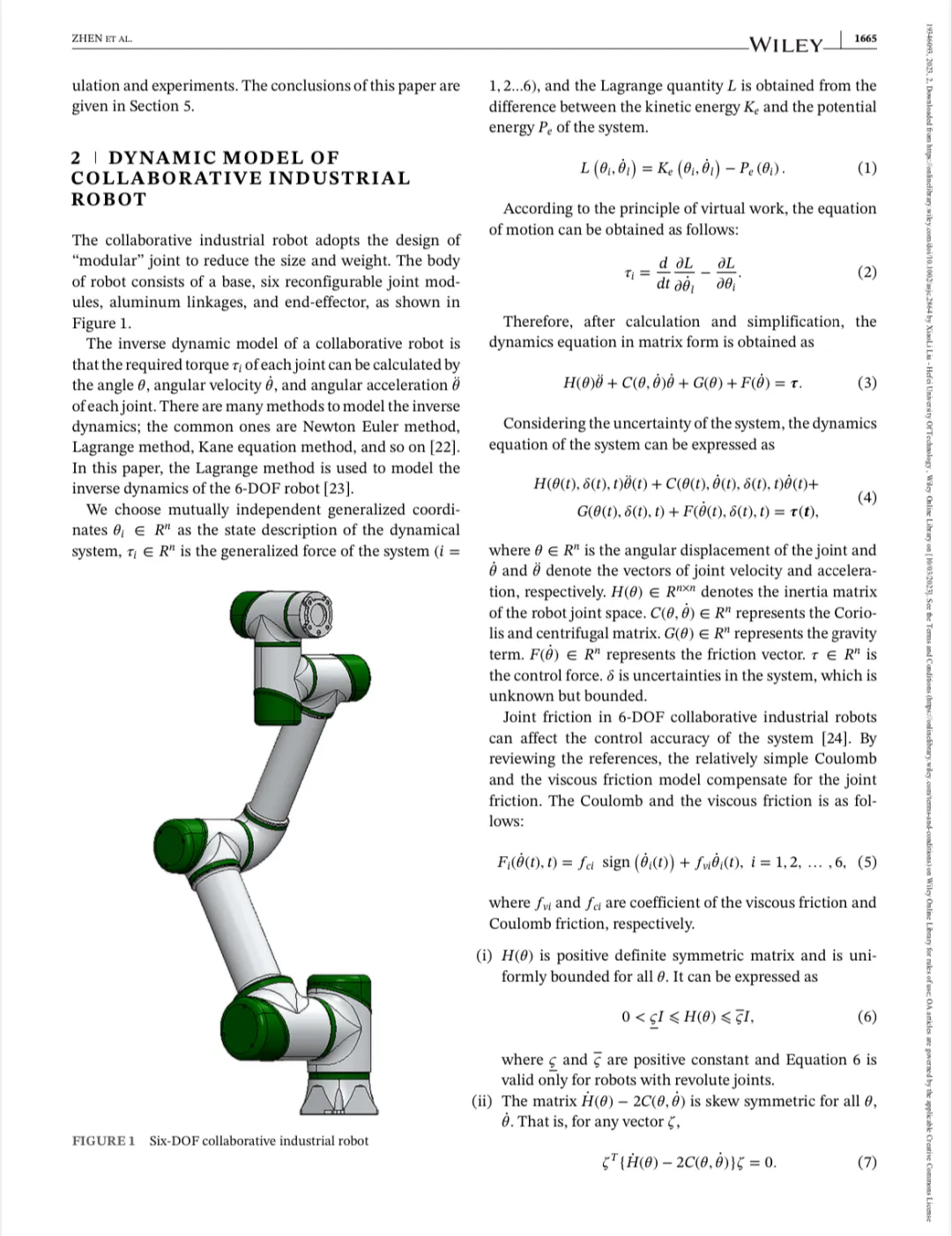
而目前,六轴机器人使用频率是最多的,主要由旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T轴)等关节构造,6个关节的合成实现末端的6自由度动作,使六轴协作机器人具有强大的灵活性。在机器人机械臂末端安装适用于特定应用场景的各种执行器,例如喷灯、钻头和喷漆器等,可以执行不同的工作任务。
一种基于模型的鲁棒控制方法——研究思路
本文提出了一种新的基于模型的鲁棒控制方法来控制具有不确定性的复杂协同工业机器人系统。设计的控制器能够满足6-DOF协同工业机器人的高速、高精度运动控制的要求。该算法是在传统PD控制的基础上设计的,并结合了鲁棒控制。
因此,该控制器不仅考虑了PD控制响应的速度,而且利用鲁棒项提高了控制的精度和可调稳定性,这对于工程师在实际工程应用中调整参数是非常实用的。通过李亚普诺夫理论分析证明,该算法能够保证系统的一致的有界性和一致的极限有界性。该算法简单的结构便于实验的实现,并在一个复杂的6-DOF协同工业机器人平台上验证了算法的有效性。
一种基于模型的鲁棒控制方法——论文工程应用价值
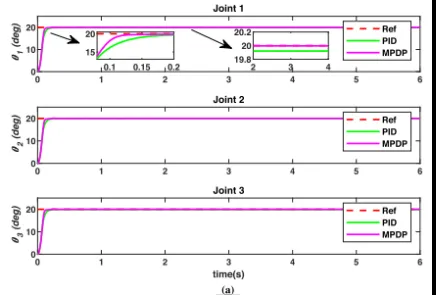
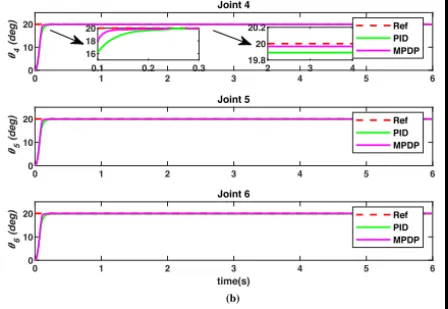
基于传统的PID控制和鲁棒控制算法,针对具有不确定性的6-DOF协同工业机器人设计了一种实用的鲁棒控制方法。该算法包括一个鲁棒项和一个基于模型的PD控制项,我们称之为MPDP控制器。通过李亚普诺夫理论分析证明,该算法能够保证系统的一致的有界性和一致的极限有界性。仿真和实验结果表明,与PID控制器相比,该机器人的稳态跟踪误差较小,具有较好的MPDP控制性能。
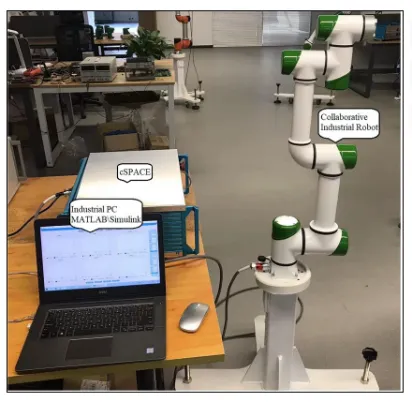
中科深谷设备科研价值——CSPACE,工业协作机器人控制平台,半实物仿真
中科深谷设备作为控制系统的主控制器,其算法开发平台可以在仿真和测试之间的整个开发阶段进行反复运行,缩短了开发周期,显著提高了开发效率。以CSPACE系统代替传统嵌入式控制器,采用基于模型设计进行快速迭代。支持硬件在环回路(HIL),将待测试控制器及部分实物与系统连接,动态检测系统整体指标。加快了系统搭建的开发进度,方便了系统运行时参数调整。在开发过程中简化了硬件设计,不必考虑模数、数模转换电路的具体实现方式,可以更加专注于算法本身的实现。