SCI期刊发表 | 深谷基于CSPACE的SCARA机器人平台赋能科研新成果
发布日期:2024-10-26 浏览次数:977
工业机器人随着人工智能技术、先进制造技术和移动互联网的创新融合越来越多的工业机器人被研发出来,开始改变工业制造与机械生产的模式,同时工业机器人产业是一个快速成长中的新兴产业,将对未来生产和社会发展起越来越重要的作用。
其中SCARA水平多关节机器人,是一种圆柱坐标型的工业机器,主要由控制系统及执行机构两大系统组成,其中机器人本体的控制系统内包括示教器与机器人控制器、伺服驱动器及扩展模块,而执行机构内包括机器人本体与伺服电机及减速装置,机器人所使用的减速装置多由谐波减速器所组成,而此类SCARA工业机器人多用于3C行业、塑料工业、汽车工业、电子产品工业、药品工业和食品工业等装配作业中。
但是随着人工成本的上涨、工作环境的改变、人口老龄化及多元化的市场竞争,各企业面临着重重压力,同时随着市场对SCARA机器人需求量的增加,使工业机器人生产单位面临一个新的研发课题。
为了减小SCARA机器人在机械系统参数不确定性和外部扰动等时变非线性不确定性下的轨迹跟踪误差,中科深谷团队提出了一种确定性形式的基于模型的鲁棒控制算法来处理不确定性。该项研究以论文(SCARA机器人控制算法)为题发表于2023年Journal of Vibration And Control(振动与控制杂志) 期刊中。
——什么是SCARA机器人?如何提高SCARA机器人的运动速度和精度?
SCARA机器人是经典的机器人产品,由于其定位精度高,运动速度快,可靠性高,成本低,占地面积小,因此在装配,分拣,焊接和加工等行业中得到了非常广泛的应用。
提高SCARA机器人的运动速度和精度,对于提高生产效率和质量,降低生产成本具有重要意义。然而SCARA机器人系统是一个具有时变、强耦合等动态特性的复杂控制系统。当我们期望更高更快的性能时,机器人的质量和转动惯量的影响不容忽视,这将大大增加系统的不确定性。因此,面对各种不确定性和外部干扰,设计一种有效的控制算法以实现高跟踪精度就显得尤为重要。本文提出的基于模型的鲁棒控制方法可以大大减小SCARA机器人的稳态误差,显著提高其轨迹跟踪精度。
一种基于Lyapunov方法的自适应滑模控制方法
——研究思路
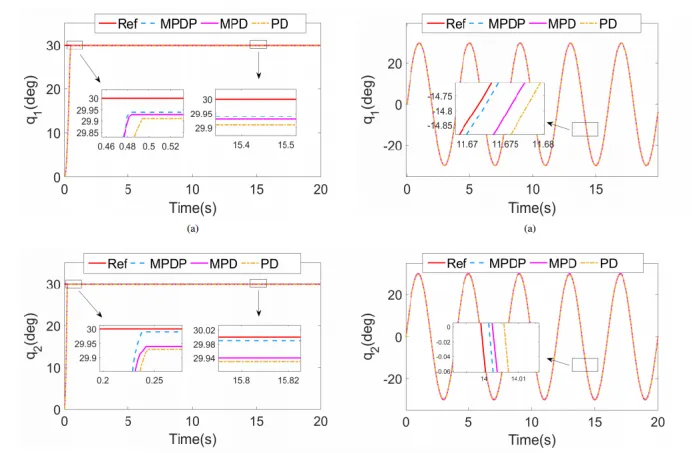
为了减小SCARA机器人在机械系统参数不确定性和外部扰动等时变非线性不确定性下的轨迹跟踪误差,本文提出了一种确定性形式的基于模型的鲁棒控制算法来处理不确定性。首先建立系统的名义模型,然后将其余部分集中到不确定性中。自适应控制假定不确定性可以用数学模型的不确定参数来描述,利用自适应律对不确定参数进行在线估计,并根据估计值实时修正控制策略,使控制系统达到性能要求。
此外,本文还提出了一种基于Lyapunov方法的自适应滑模控制方法,该方法通过自适应律保证系统在存在不确定性时的鲁棒性。最后,数值仿真和实验结果表明,本文提出的控制算法对SCARA机器人具有良好的控制性能。
一种基于Lyapunov方法的自适应滑模控制方法
——论文工程应用价值
本文所设计的鲁棒控制器具有参数和固定结构,能够在一定的系统不确定性范围内保持一定的性能指标,从而保证SCARA系统的稳定性。基于模型的鲁棒控制方法由传统PD项和基于模型的鲁棒项组成,可以在不捕获不确定信息的情况下提高SCARA机器人系统的跟踪精度。与SCARA机器人系统传统的的PD和MPD控制算法相比,本文所使用的MPDP控制算法具有较好的控制性能,对机械系统参数不确定性和外部干扰的影响具有良好的鲁棒性。
中科深谷设备科研价值
——CSPACE,SCARA机器人控制平台,半实物仿真
中科深谷设备作为控制系统的主控制器,其算法开发平台可以在仿真和测试之间的整个开发阶段进行反复运行,缩短了开发周期,显著提高了开发效率。CSPACE控制系统利用德州仪器C2000处理器提供的嵌入式编码器支持包,与MATLAB具有很高的兼容性。它提供12个输入变量和4个输出窗口,我们可以直接在线修改输入变量,反馈结果可以实时显示在输出窗口。CSPACE控制平台界面简单,操作方便,为我们的实验提供了极大的方便。