轻量化设计&⼯业级表现|中科深谷新品发布:开源桌面型六轴机械臂
发布日期:2024-10-22 浏览次数:2756
目前3C行业的工艺及设备都已相当成熟,其加工内容重复度高,劳动强度高,这都符合自动化改造特征。特别是在人工成本逐年上升和制造精度强度加大的叠加影响下,3C自动化改造几乎成为产业发展的必然选择。
微型(小型)六轴机器人集成了大型六轴机器人和SCARA机器人的特点,在搬运码垛、抛光打磨以及喷涂领域的应用都将有很大的发展空间。与笨重的重负载六轴机器人相比较,微型(小型)六轴机器人因其灵活性和易安装的特点,非常适用于复杂环境的应用,正好契合了3C产品多批量、小品种的特点。
中科深谷最新推出开源桌面型六轴机械臂平台,专为科研教育、创科应⽤等场景开发的六⾃由度协作机器⼈平台。

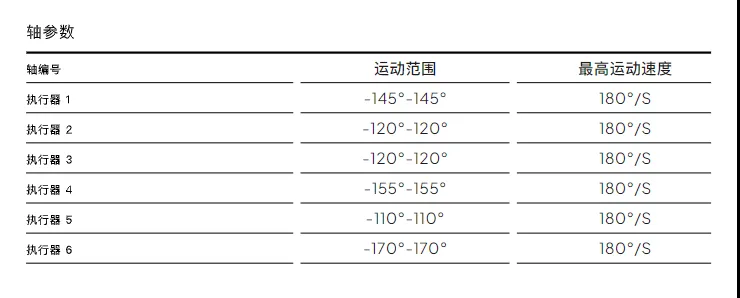
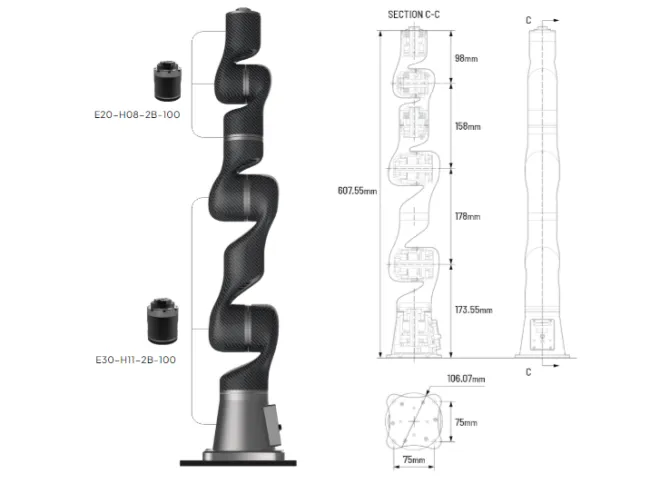
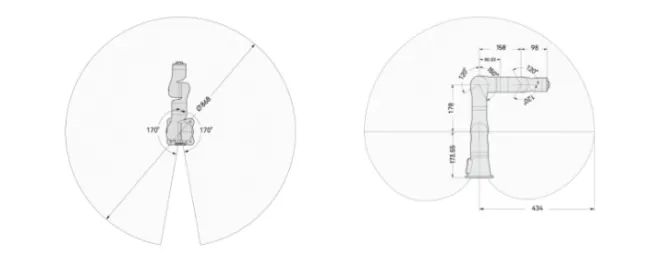
桌面型六轴机械臂平台采用全新设计的六自由度协作机器人,具备1.5 kg负载能力,⾃身重量2.8 kg,臂⻓607.55 mm,重复定位精度达0.01mm,⼯作范围达434 mm,多轴联动、碳纤维外壳、⾼性能机器⼈关节,可适配多种末端执行器。
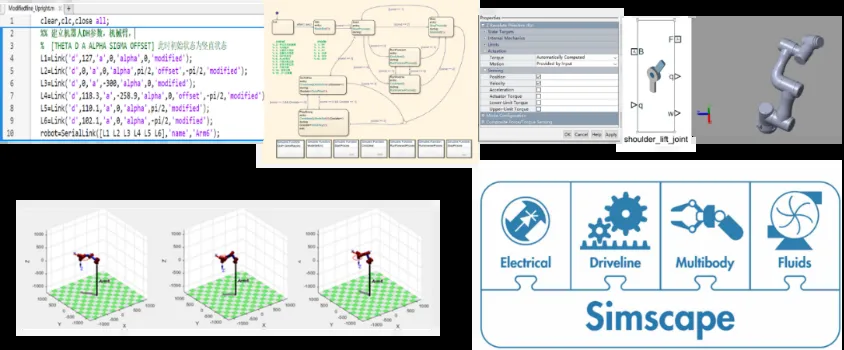
平台控制器支持MATLAB/Simulink编程,能实现从机器人运动学到动力学建模与控制及系统集成等全方位教学与研究。
平台全面开放控制接口,提供更全面、更具针对性的接口选择,可满足实现物品分拣、图像识别、写字绘画等AI场景需求。
一、产品配置
01、工业级执行器
采⽤谐波减速器技术,智能⼀体化设计。
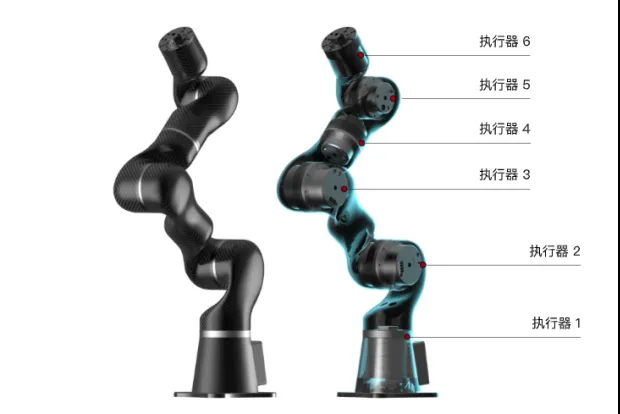
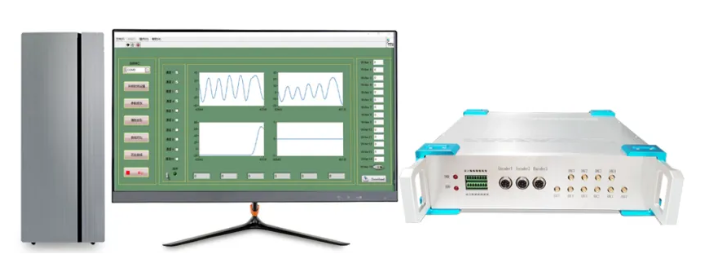
02、机械臂本体
尺寸&工作范围
CSPACE实时仿真控制系统(型号:VSRT-M3000)是基于TMS320F28335 DSP和MATLAB/Simulink开发。拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是基于模型设计(MBD:Model-Based Design)典型的产品。
CSPACE控制器
控制系统技术参数

二、产品特点
01、多轴联动
02、高性能机器人关节
03、碳纤维外壳
04、适配多种末端执行机器人

三、MBD开发方式
采用MBD进行机械臂开发设计,特色如下:

01、将仿真建模与实际研发产品结合,引入高可靠性的实时软硬件环境做技术保障。
02、从需求捕获到设计、实现和测试,系统模型开发和测试始终占据开发流程的核心。
03、追求持续不断的创新,将客户所追求的前沿创新技术与安全、可靠的核心功能有机结合。
四、配套系统及软件支持
01、MATLAB/Simulink
02、上位机
友好的交互界面,开放的通讯协议,丰富的功能指令模块,可自定义数据图形化显示、数据保存、在线调参。

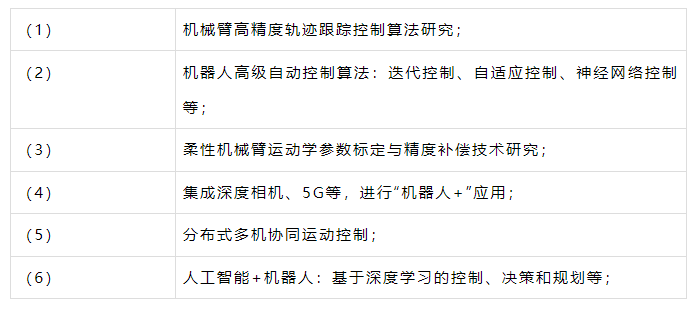
五、平台技术实验具体介绍
以下是本平台提供的实验列表,所有实验均基于Matlab/Simulink软件编写,其源代码完全开放,可自由修改。
支撑科研方向