

激光SLAM和导航定位平台|3D激光雷达(LiDAR)与惯性测量单元(IMU)的紧耦合融合技术
发布日期:2024-10-28 浏览次数:2435
近年来,移动机器人技术在世界范围内得到快速发展。人们致力于把移动机器人应用于各种场景中,从室内外搬运机器人,到服务型机器人,再到工业机器人等,移动机器人的运用都得到了巨大突破。
在移动机器人研究中一个最关键的技术就是即时定位和建图,也就是SLAM技术。SLAM它试图解决这样的问题:一个机器人在未知的环境中运动,如何通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。
基于此,中科深谷研发工程师开发了激光SLAM和导航定位平台,该平台实现构建出与环境特征一致的高精度地图并在地图上实时输出机器人的位姿信息,主要由硬件算力平台、软件方案和激光雷达传感器等组成。并基于激光SLAM和导航定位平台衍生出了SLAM技术方案——3D激光雷达(LiDAR)与惯性测量单元(IMU)的紧耦合融合,该技术方案能够提高定位和姿态估计的精度、可靠性以及鲁棒性,特别是在高速动态、复杂环境、遮挡多或 GPS 不可靠的情况下。这使得紧耦合系统在自动驾驶、无人机、自主机器人导航和高精度地图构建等场景中具有极大的优势。

PART 01 激光SLAM和导航定位平台
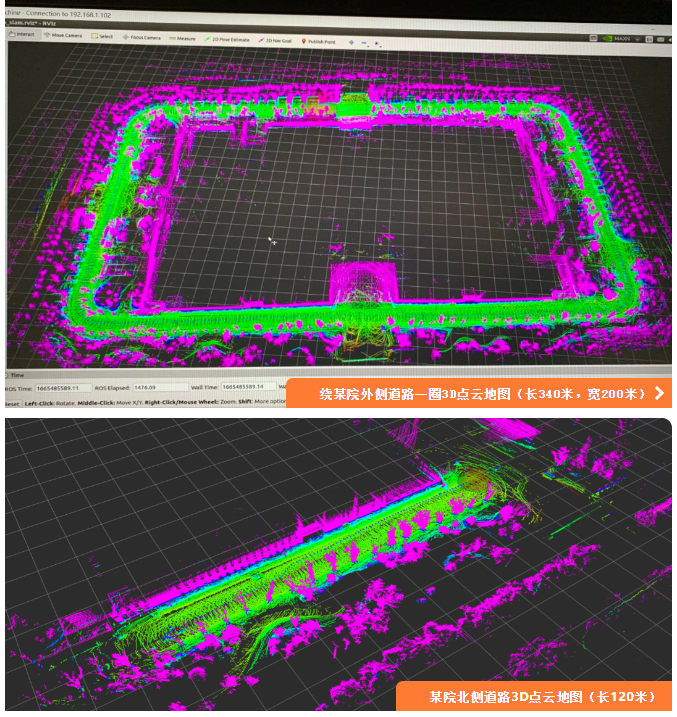
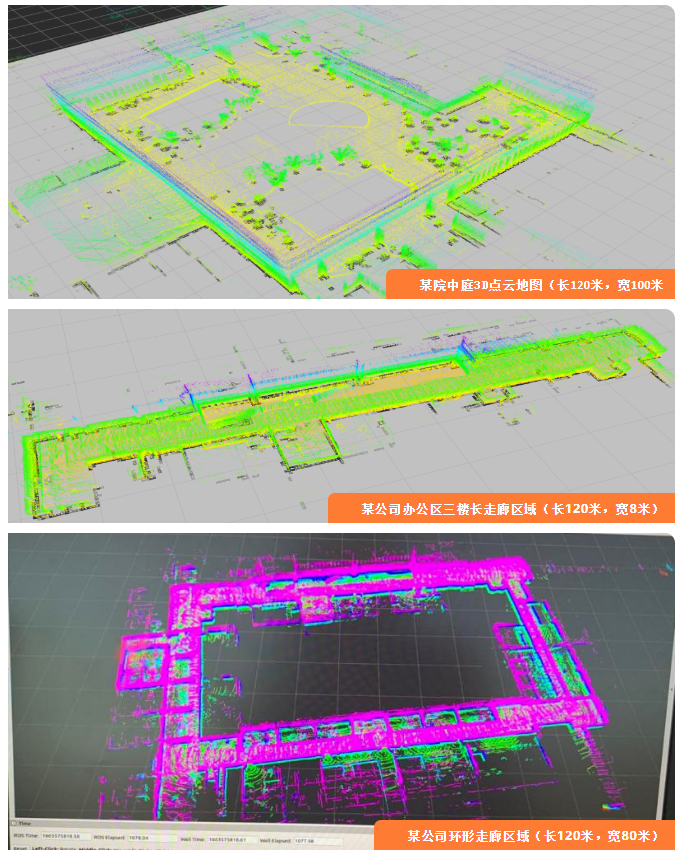
室内外大场景3D高精度建图
激光SLAM和导航定位平台支持快速的建图方式,可实现全自动三维高精度导航地图绘制与三维场景建模,建图操作简单、易行,无需过多先验知识即可实现彩色三维点云构建,具备地图自主更新能力。拥有高精度和鲁棒激光SLAM前端激光里程计和后端图优化功能,确保构建出与实际环境高度一致的地图。
激光SLAM和导航定位平台

构建不同场景下的3d地图性能
PART 02 激光SLAM和导航定位最新技术
3D激光雷达(LiDAR)与惯性测量单元(IMU)的紧耦合融合技术
激光SLAM和导航定位平台基于激光雷达SLAM系统目的在于构建出符合环境特征的高精度地图,基于激光雷达导航定位系统目的在于在已知环境地图上实时输出机器人在地图上的位姿,两者紧密相关,SLAM系统输出的地图精度决定了导航定位系统输出位姿的精度。
3D激光雷达(LiDAR)与惯性测量单元(IMU)的紧耦合融合技术实现激光SLAM,紧耦合优势有以下几点:
1. 更高的定位精度
·LiDAR 提供丰富的空间信息:LiDAR 能够生成精确的 3D 点云数据,提供周围环境的详细信息和高分辨率的空间地图。
·IMU 提供高频率的姿态变化信息:IMU 可以在高频率下输出加速度和角速度数据,提供即时的姿态估计,尤其是在 LiDAR 扫描频率较低或短时间失效的情况下,IMU 能补充这些空隙。
·紧耦合可以提升定位精度:通过紧耦合,LiDAR 和 IMU 数据可以在时间和空间上进行深度融合,使系统能够获得更精确的位置和姿态估计,特别是在复杂环境或高动态条件下(如移动速度较快时),这种融合能减少估计误差。
2. 提高系统鲁棒性和可靠性
·对遮挡和环境变化的鲁棒性:LiDAR 在某些环境下可能会出现遮挡、反射或无法获取足够的点云数据(如在封闭空间、隧道等场景中)。IMU 则能够持续提供位姿估计信息,帮助系统在短时间内克服 LiDAR 数据缺失的问题。
·姿态估计的持续性:当 LiDAR 的观测环境不佳时,IMU 可以通过惯性导航保持系统的姿态估计,减少定位漂移。结合紧耦合算法,系统能够在 IMU 数据存在漂移的情况下,通过 LiDAR 数据校正误差,保持高精度的位姿估计。
3. 更快的响应速度
·实时姿态估计:IMU 的高频输出可以提供实时的角速度和加速度信息,使系统在快速运动的场景中能更快地响应。这对于自动驾驶车辆或无人机等需要实时决策的应用场景尤为重要。
·短期运动补偿:由于 LiDAR 通常每秒钟只能进行几十次扫描(即更新频率较低),在两次扫描之间的时间差里,IMU 能够提供连续的姿态和运动数据,从而补偿两次扫描之间的运动,使得系统能够处理快速运动中的数据,并避免因运动产生的误差。
4. 对动态环境的适应性
·高速动态下更稳定:当系统在高速运动或动态环境下(如颠簸路面、空中飞行)时,IMU 可以捕捉到这些高速动态变化,并提供即时的姿态调整信息。通过紧耦合的 LiDAR 和 IMU 数据融合,系统可以在动态环境下保持高精度和稳定的姿态估计。
·抗抖动和震动:IMU 可以检测到系统的微小抖动和震动,并在数据融合过程中进行补偿,使 LiDAR 的点云数据不受到小幅度运动或震动的影响,提高系统的鲁棒性。
5. 减少漂移误差
·IMU 的漂移问题:IMU 在长期使用中由于噪声和漂移,单独使用时会产生累积误差。而 LiDAR 的绝对位置和姿态估计可以纠正 IMU 的漂移,使得系统在长期运行中保持稳定和准确的位姿估计。
·LiDAR 数据校正 IMU:LiDAR 提供的静态环境信息可以用来校正 IMU 的累积误差,特别是在多传感器融合的算法中,LiDAR 常被用来对系统进行全局校准。
PART 03 深谷开源移动机器人
解锁多种工业应用场景

安防领域——电力巡检机器人

巡检领域——设备巡检机器人

农业领域——农业采摘机器人

物流领域——仓库盘点机器人

工业领域——移动配送机器人

公共领域——智慧消杀机器人
中科深谷激光SLAM和导航定位平台适配中科深谷全系列底盘(四轮四转移动机器人、四足机器人等),实现建图、定位与导航功能,系统与底盘通过CAN通讯接口链接,实现全向运动控制、原地旋转、双阿克曼、横移、斜移等多种运动模式。
PART 04支持实验内容
1、构建环境地图实验
使用多线激光雷达传感器实现对环境地图的构建
融合多传感器信息实现对环境地图的构建
2、基于地图定位实验
实现基于地图的定位功能实验
融合多传感器信息实现鲁棒高效定位功能实验
支持科研方向
激光SLAM高精度前端里程计功能设计研究。
激光SLAM闭环检测功能设计研究。
激光SLAM后端图优化功能设计研究。
多传感器融合策略设计研究。
扩展卡尔曼滤波位姿迭代功能设计研究。
从应用稳定性、导航精确性、落地成本等多方面因素考虑,激光SLAM无疑是未来导航的发展趋势。而且随着导航技术的更新迭代,多技术的融合将更深入,多导航融合应用的优点也会更加显著。中科深谷将始终以技术创新为驱动,推动激光SLAM和导航定位技术朝着更高柔性、更高精度和更强适应性的方向发展。


