SCI期刊发表 | 深谷基于永磁直线电机平台赋能科研新成果
发布日期:2024-11-22 浏览次数:924
直线电机不需要转换机构,直接将电磁能转换为直线运动的机械能,实现高精度的直线运动。因此,它被广泛应用于现代高精度机械系统,如半导体制造业,数控机床和工业机器。直线电机通过改变旋转电机的结构,取消了转换机构,大大降低了接触型的非线性和扰动的影响,如间隙和摩擦等。
为了实现对含不确定性的PMLM系统的高精度轨迹跟踪,中科深谷团队设计了一种鲁棒控制方法。该项研究以论文(永磁直线电机)为题发表于2023年ROBOTICS(机器人学) 期刊中。
——直线电机工作原理?
直线电机是一种通过将封闭式磁场展开为开放式磁场,将电能直接转化为直线运动的机械能,而不需要任何中间转换机构的传动装置。它的结构可以看作是将旋转电机从中间切开并拉伸成直线而形成,主要由定子和移动部件组成,定子产生磁场,移动部件受到磁力作用而运动。
一种鲁棒控制方法
——研究思路
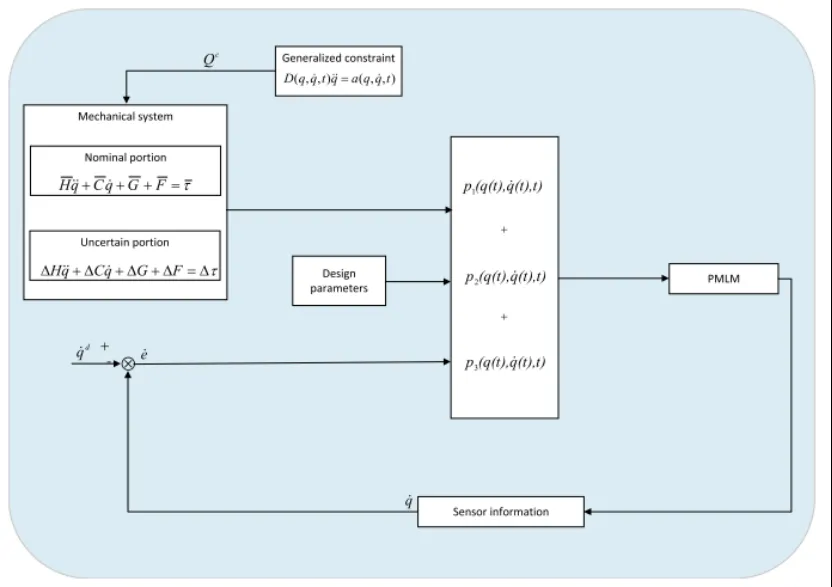
基于Udwadia-Kalaba方程描述永磁直线电机(PMLM)的动力学模型,结合约束跟踪方法,提出一种鲁棒控制方法,实现对含不确定性的PMLM系统的高精度轨迹跟踪。首先,通过在PMLM系统的无约束Udwadia-Kalaba方程中加入广义约束力,将PMLM系统描述为约束跟随系统。其次,基于所提出的模型,通过不确定性分析,设计了鲁棒约束跟踪控制器。同时,证明了所设计的控制器对于不确定系统具有确定性性能:一致有界和一致最终有界。数值仿真和实验结果均验证了该系统控制方法的正确性与有效性。最后,本文的约束跟踪设计方法也可应用于其他不确定系统。
一种鲁棒控制方法
——论文工程应用价值
本研究旨在通过抵抗外部干扰和内部不确定性来实现高性能的轨迹跟踪。实际上,我们不仅提出了一个鲁棒控制器的不确定系统,但它也应用到PMLM的轨迹跟踪。一致有界性与一致最终有界性得到了保证。通过仿真和实验验证,验证了理论分析的正确性,并与传统的鲁棒控制器进行了比较。通过采用约束描述的U-K方法,该控制器以较低的控制代价获得了较好的稳态性能。最后,对于其他二阶系统,可以通过将系统描述为约束U-K方程来进行动态系统的分析和控制器的设计。
中科深谷设备科研价值
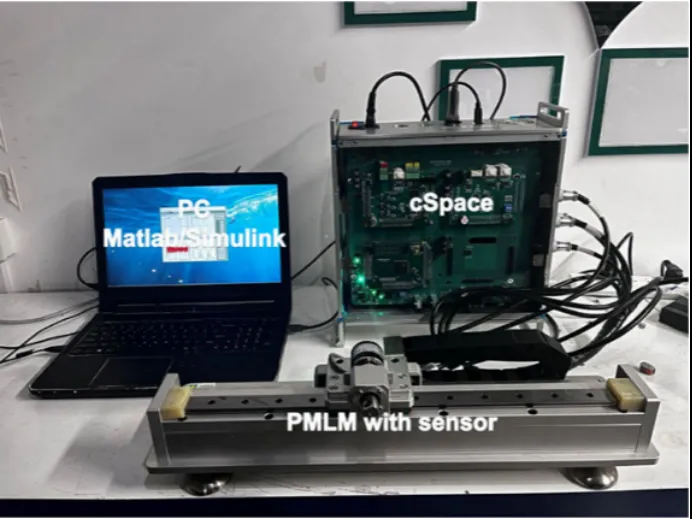
——CSPACE,永磁直线电机平台,半实物仿真
实验平台主要由装有直线位移传感器的直线电机、cSPACE实时控制系统、电机伺服驱动器、装有MATLAB/Simulink的PC机以及用于发送控制数据和监控相关数据的图形用户界面组成。通过Matlab 2018 b/Simulink平台,对基于动态模型和鲁棒控制器的PMLM进行仿真,验证了所提控制器的可行性和准确性。