

大学生创新创业大赛 | 深谷开源恒力打磨机器人平台赋能科研新成果
发布日期:2025-01-06 浏览次数:891
近期,第十八届iCAN大学生创新创业大赛落幕,来自全国1518所高校的32144支团队师生逐梦创新,合肥工业大学宣城校区甄圣超团队在安徽赛区决赛中脱颖而出,凭借”基于轨迹跟踪和导纳控制高精度开发的恒力打磨协作机器人”参赛作品获得一等奖。
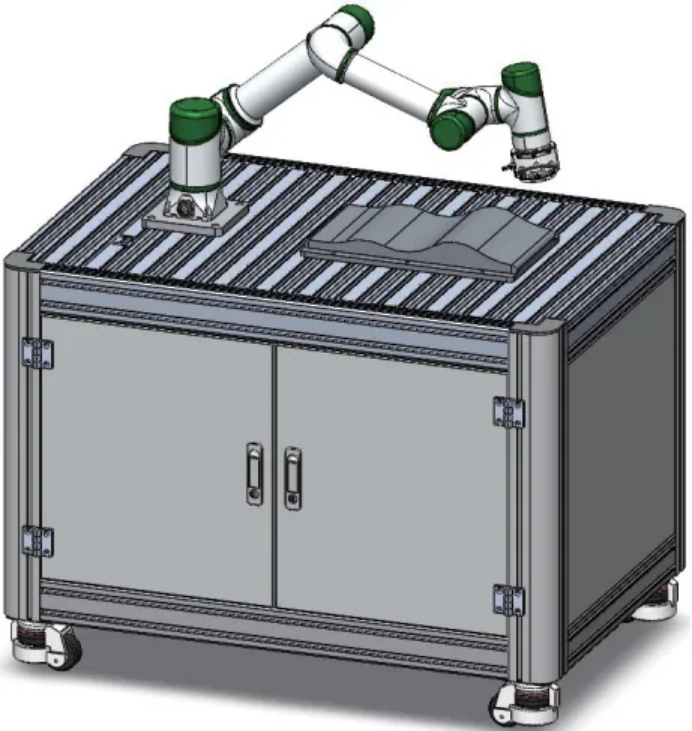
据了解,参赛作品中合肥工业大学宣城校区团队使用了中科深谷的开源恒力打磨机器人作为实验平台。该平台配备了开源六轴协作机器人、六维力传感器、浮动打磨头与曲面模块为基础,采用柔顺控制与在线轨迹规划功能,实时调整轨迹,自适应曲率变化,实现最优的恒力曲面打磨效果。
在教学方面,中科深谷的开源恒力打磨机器人平台可作为重要的教学工具,帮助学生直观理解协作机器人的工作原理及应用场景,培养学生的实践能力和创新思维,为机器人领域的人才培养提供了有力支持。
开源恒力打磨机器人平台的优势
1、基于视觉的打磨轨迹规划
3D视觉识别出待打磨的位置,在线计算机械臂运动轨迹,然后把轨迹发给机械臂控制器,执行对应的轨迹运动。
2、基于六维力传感器恒力打磨
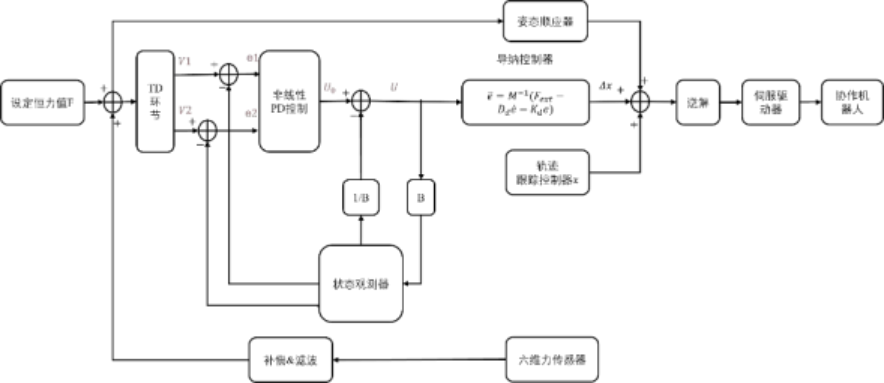
恒力打磨控制算法

恒力控制效果对比
3、高精度协作机械臂轨迹跟踪控制
近年来,中科深谷一直研究、测试机器人与环境接触场景下的曲面跟踪算法,并逐渐将其转化成机器人自动进行轨迹学习的技术。借由力控,自适应机器人可以很轻易地跟随随机的复杂曲面,自动记录轨迹和压力状态,并利用自学习出来的控制策略执行打磨任务。
4、曲面贴合能力
应用全身力控的方式,恒力曲面打磨机器人可以很完美地进行实时曲面贴合,这也是实现曲面打磨应用的最核心技术之一。尤其是对于复杂的、大曲率的曲面,机器人也可以如同人手一般紧密贴合。


