

SCI论文 | CSPACE实时仿真控制系统赋能SCARA机器人实现高精度运动控制
发布日期:2025-03-03 浏览次数:1105
随着工业自动化的快速发展,SCARA机器人作为一种高精度、高速度的工业机器人,被广泛应用于装配、分拣和码垛等任务中。然而,SCARA机器人在实际运行中面临着诸多挑战,尤其是系统参数的不确定性和外部干扰(如摩擦力、负载变化等)会显著影响其运动精度和稳定性。
为了提高SCARA机器人的控制性能,中科深谷团队设计了一种新的鲁棒控制方法,旨在减少SCARA机器人的轨迹跟踪误差(包括机械系统参数的不确定性和外部干扰),并提出了一种基于模型的确定性鲁棒控制算法来处理不确定性。该控制算法由两部分组成:
► 传统的比例-微分(PD)控制:提供基本的反馈控制,确保系统的稳定性。
► 基于Lyapunov方法的鲁棒控制:具有基于模型和基于误差的特点,能够有效应对系统的不确定性和外部干扰。
通过Lyapunov方法,团队从理论上证明了所提出的控制算法的稳定性,表明系统可以保持一致有界性和一致最终有界。此外,团队还采用了不同的摩擦模型来研究摩擦对机器人关节性能的影响。数值仿真和实验结果表明,该控制算法在SCARA机器人上具有优异的控制性能。
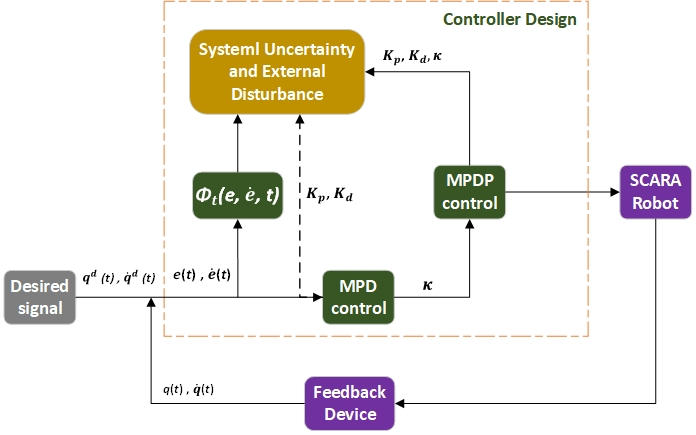
图:实验原理图
该研究成果以《Model-based robust control design and experimental validation of SCARA robot system with uncertainty(基于模型的不确定性SCARA机器人系统鲁棒控制设计与实验验证)》为题,发表在《Journal of Vibration and Control(震动与控制)》期刊上。
 图:论文截图
图:论文截图
研究亮点
1. 无需精确建模
传统的控制方法通常依赖于精确的系统模型,而本文提出的方法能够在系统参数不确定的情况下,依然保持较高的控制精度。通过引入鲁棒控制项,系统能够有效补偿参数不确定性和外部干扰,显著提高了控制算法的鲁棒性。
2. 鲁棒性强
通过Lyapunov方法,本文证明了所提出的控制算法能够保证系统的一致有界性和一致最终有界性,确保系统在不确定性环境下的稳定性。即使在面对复杂的非线性系统和外部干扰时,系统依然能够保持较高的控制精度。
3. 实验验证
通过数值仿真和实验验证,本文展示了所提出的控制算法在SCARA机器人上的优异性能。实验结果表明,该算法在面对负载变化和外部干扰时,表现出了显著的鲁棒性和高精度轨迹跟踪能力。
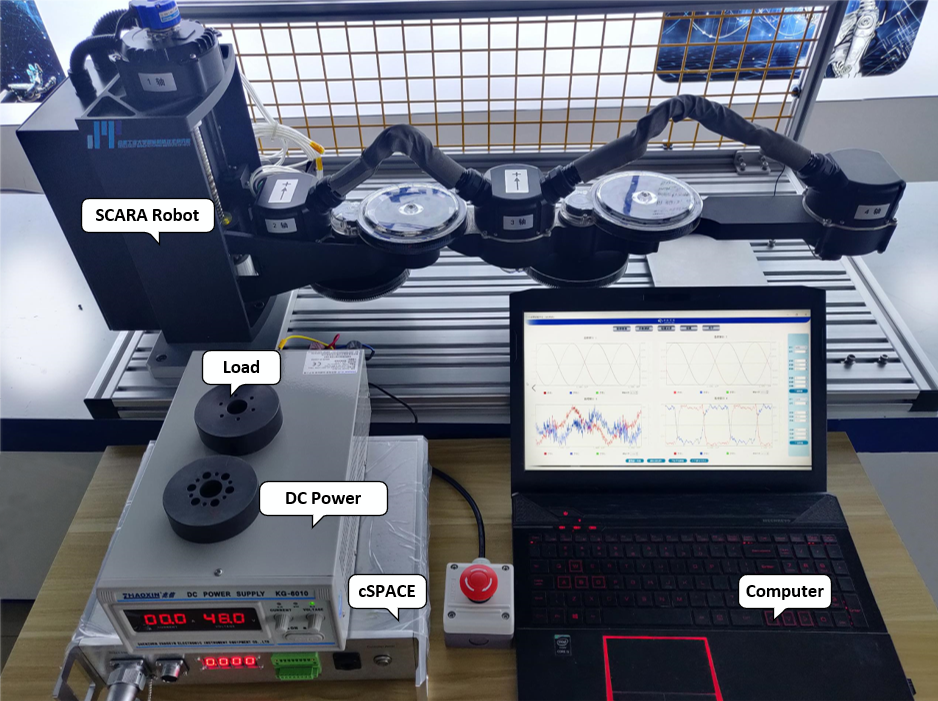
图:SCARA机器人及实验仪器
▷ CSPACE实时仿真控制系统赋能科学研究取得创新突破
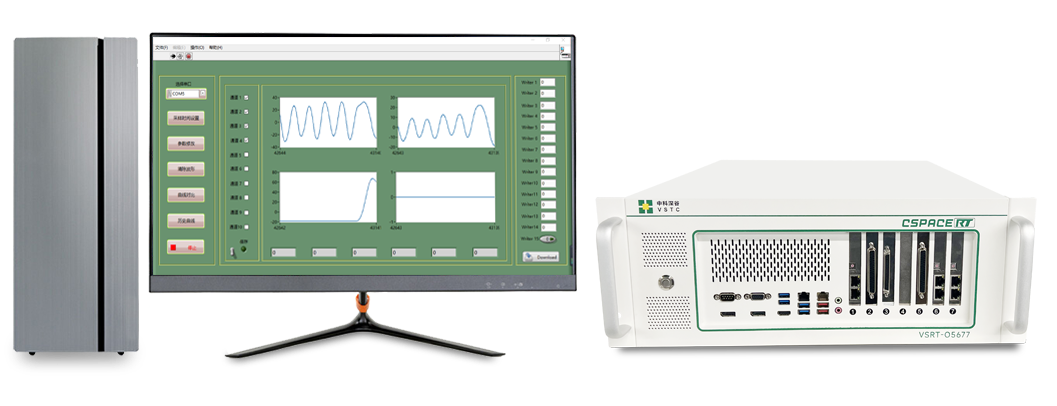
本研究基于中科深谷核心产品CSPACE实时仿真控制系统进行仿真控制和实验验证。CSPACE系统具备高效的算法开发平台,能够在仿真和测试之间无缝迁移,极大地缩短开发周期,提高实验效率。
01 高效的开发环境
自动扫描功能,开机直接使用,免去繁琐的IP配置流程和步骤,更加高效;与MATLAB/Simulink无缝衔接,基于CSPACE-LAB专业开发环境,集成工程、模型、数据等开发与测试一体化,开发更加便捷;
02 良好的兼容性和扩展性
兼容国内外众多厂家的硬件板卡,每张板卡都提供标准的demo,使用便捷,开箱即上手。针对不同厂家类型的板卡,能快速选型适配扩展使用;
03 灵活的应用场景
CSPACE系统广泛应用于机器人控制、电机控制、自动化生产线等领域,能够满足不同应用场景的需求;系统支持多种控制算法(如PID控制、鲁棒控制、自适应控制等),能够灵活应对复杂的控制任务;
04 一站式开发与管理软件
实时仿真管理软件CSPACE-LAB具备工程管理、模型管理、实时数据录制与回放、自定义UI、变量监控、模型监控等核心实用功能,满足一站式开发与管理应用需求。
本论文提出的基于模型的鲁棒控制方法,依托CSPACE实时仿真控制系统的高效开发平台,成功实现了SCARA机器人的高精度运动控制。未来,随着工业自动化对高精度机器人控制需求的不断增加,该研究成果有望在更多领域得到推广,推动机器人控制技术进一步发展。
CSPACE实时仿真控制系统作为控制算法开发的重要工具,也将继续在科研和工业应用中发挥其独特的优势,赋能更多研究取得创新突破。


