

聚焦具身智能!2025深谷工程师学院师资研修班即将来袭!
发布日期:2025-07-01 浏览次数:478

当面对环境未知、任务多变、设备异构的复杂作业场景时,如何让智能体像人类一样感知环境、自主决策并精准执行复杂任务,已成为全球科技界的核心命题。
为推进具身智能关键技术在人工智能与机器人领域的教学科研与产业应用,深谷工程师学院联合国家软件人才国际培训基地,依托深谷科技“开源智脑系统”赋能开发的前沿研发成果,定于 2025年7月17—19日(共3天)在安徽合肥举办“具身智能多模态机器人开发与应用”师资研修班。
本次研修聚焦具身智能核心框架,通过真场景、真项目、真设备实战,复现机器人“感知-认知-行动”全流程开发,助力研修人员快速掌握移动机器人的开发流程、核心算法及其在ROS平台上的应用,为教学科研和项目开发工作打下坚实基础,提升解决实际工程问题能力。现将有关事项通知如下:
课程特色
▶ 具身智能理论-实践闭环:
感知层:激光雷达SLAM建图、深度视觉目标识别与检测
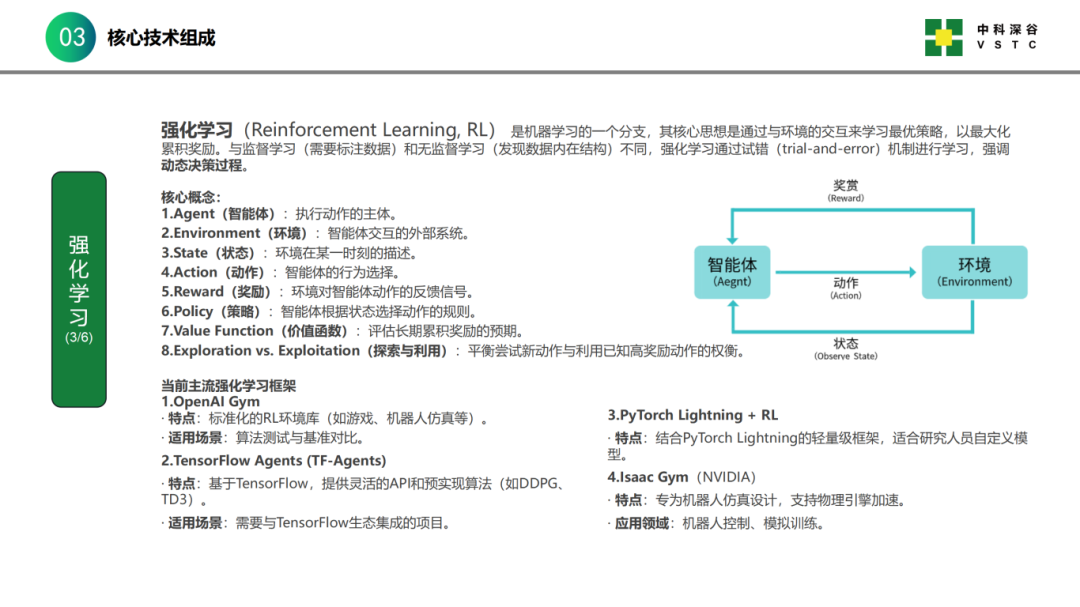
决策层:路径规划(A*/DWA)、蒙特卡罗定位(AMCL)、强化学习策略设计
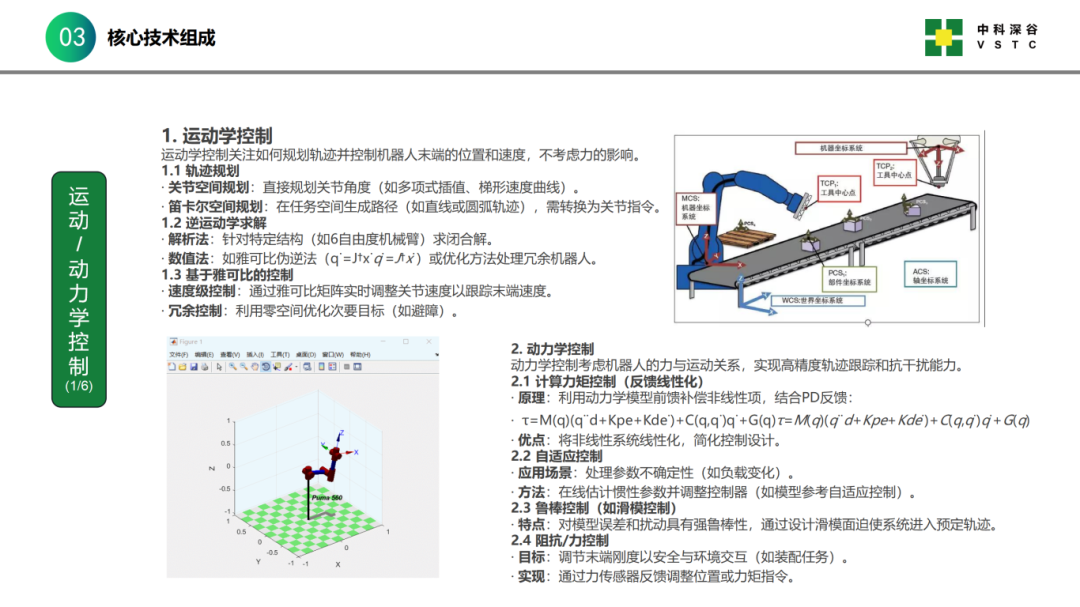
行动层:底盘运动控制、机械臂抓取、模仿学习与强化学习驱动行为生成
▶ 真场景、真项目、真设备实战,沉浸式项目实操
▶ 深谷开源智脑系统赋能,提供从仿真到教学科研所需的实验代码、教学资源
培训对象
全国高校机器人工程、自动化、机械电子、人工智能、智能制造等专业教师;企业工程师;对该方向具有浓厚兴趣的本科生、研究生和博士生等。
(本期限额35名,报满即止。)
主办单位
国家软件人才国际培训基地
深谷工程师学院
时间地点
时间:2025年7月17—19日(7月16日报到)
地点:合肥工业大学智能制造技术研究院(包河区黑龙江路与花园大道交叉口)
专题培训内容
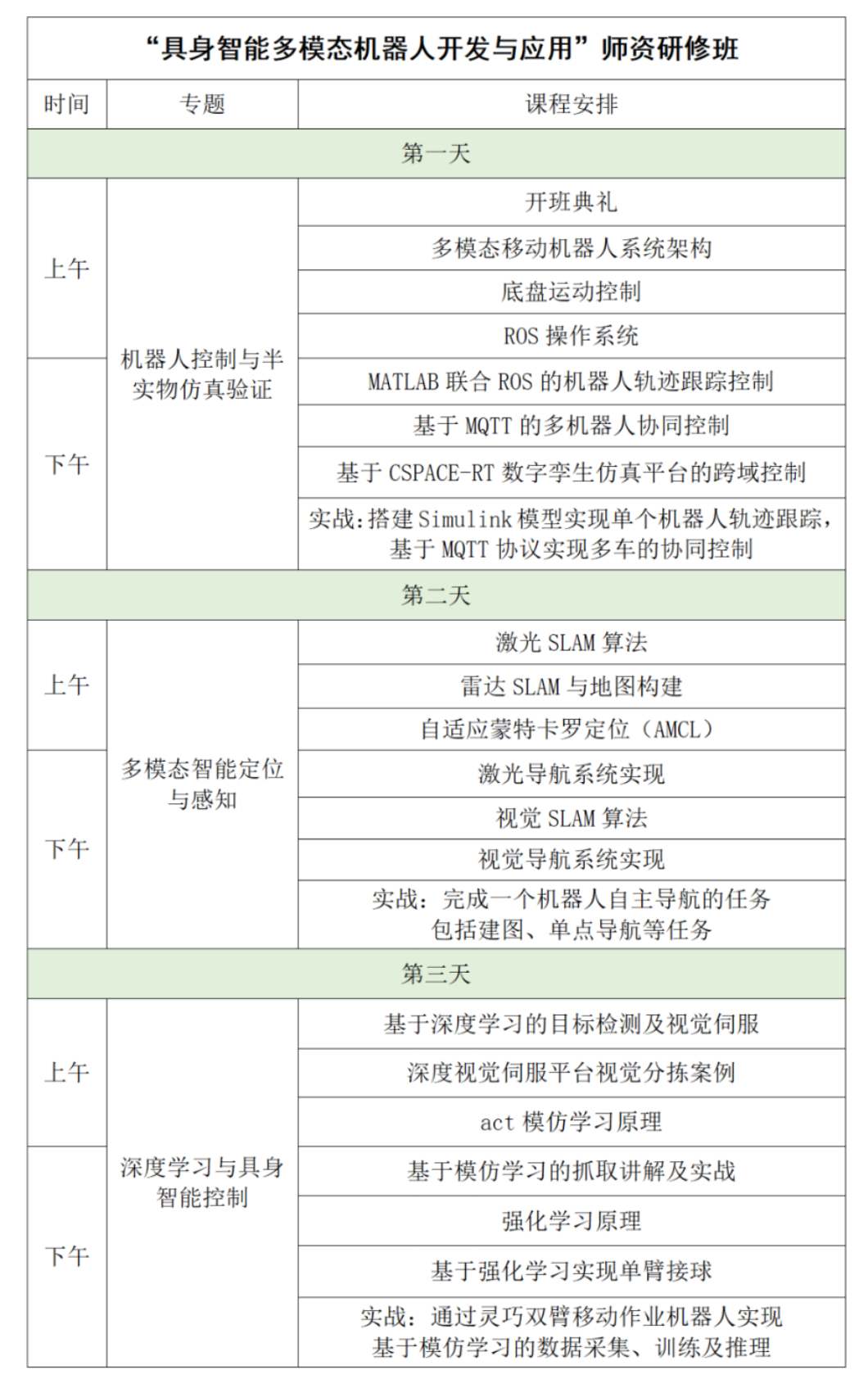
课程剧透


实战设备


主讲团队
甄圣超
教授/硕导/博导教授
硕导,博导,博士(中美联合培养),机械电子专业,工学博士学位。曾于美国佐治亚理工学院机电系进行机器人建模与控制理论的研究。参与973子项目一项,863项目二项,安徽省科技攻关一项,江苏省重点研发一项,陆航“十三五”项目一项。主持合工大智能院机器人公共平台建设项目一项、国家基金两项(面上、青年)、省重点两项、中国博士后面上一等资助一项、安徽省面上基金一项、合肥市研究院研发资金项目一项等。主持机器人相关横向项目十余项。
何士举
资深机器人研发工程师
深谷工程师学院高级讲师,负责基于2d与3d感知的视觉定位引导系统开发,参与无人智慧中心建设,中科大机器人实验室改造等多个项目,以项目为导向带领团队开发多款视觉伺服产品。
刘天浩
资深机器人研发工程师
深谷工程师学院高级讲师,拥有丰富的人工智能机器人系统开发、软件开发经验,熟悉ROS移动机器人、移动机械臂视觉作业机器人的产品开发,对机器视觉、3D视觉、智能机器人也有深入研究。曾作为主要团队负责人开发的TOF原理的车规级3D相机,已批量生产,并为知名AGV、电动叉车企业做配套。
李伟文
资深机器人视觉算法工程师
深谷工程师学院高级讲师,深耕机器人视觉算法研发多年,拥有丰富的机器视觉相关技术研究及实际产品设计、开发经验。主导开发的深度视觉伺服分拣系统,已落地3C电子、医疗耗材分装等高端制造场景。
培训费用
培训费用为3500元/人,包含教材与资料费、培训费、设备使用费、证书费等。培训学员的交通费、食宿自理。
▶ 备 注:本次培训班最大容量为35人,按报名先后次序录取。超过35人后, 沟通后编入下一期培训班(具体时间地点另行通知)。
会务收款单位账号信息:
1、转账汇款
账户名:安徽深谷科曼机器人技术有限公司
账户:3401040160001101568
开户行:杭州银行合肥包河支行
付款时在备注留言处注明“学校名称+培训费”,付款后将付款凭单照片或扫描件以电子邮件形式发至指定邮箱(edu@vstc.cc)如需开具发票,请在邮件中注明开票信息。
2、现场缴费:现金或公务卡刷卡。
发票说明:发票内容为“技术培训”,由安徽深谷科曼机器人技术有限公司统一开票,并于培训结束后统一发放。
报名方式
会务许老师(微信同号):13170279219
请有意参加本次研修班的学员填写报名回执表,并于2025年 7 月 16 日前将回执发至指定邮箱edu@vstc.cc(或发至会务老师微信)。会务组将在收到报名信息后发送确认信息。
▶ 特别提醒:请各位参加培训的教师自备笔记本电脑。
咨询方式
任何疑问,可咨询本次培训的工作人员:
许老师电话(微信同号):13170279219
或者扫描二维码添加微信

期待与您携手
共同推动具身智能技术的发展与应用!


