

如何让机器人“心有灵犀”,实现空地异构无人集群协同控制?
发布日期:2025-07-08 浏览次数:24
随着通信网络技术,环境感知技术,无人系统控制和决策等多智能体协同控制技术取得突破性进展,智能无人集群系统得到了深入研究。跨域协同是智能无人集群系统形成颠覆性能力的核心技术。与传统智能无人集群系统的单域协同相比,跨域协同拥有优势互补、全方位联动等新技术特点,在大幅提升智能无人集群系统功能的同时,能够不断扩大其应用范围。
空地跨域协同控制是指由无人机(UAV, Unmanned Aerial Vehicle)、无人车(UGV, Unmanned Ground Vehicle)以及其他地面控制中心通过信息共享、任务分配和协同决策,实现高效作业的一种技术。
对于现实生活中的复杂和多样化任务,单域智能体完成效率可能并不高,跨域智能体协同研究可以充分发挥各域机器人的优势并进行资源整合,实现复杂任务的高效处理。空地协同无人系统在军事、灾害救援、农业、城市建设等方面都有着广阔的应用前景。

图1:空地协同无人系统应用领域
某高校科研团队依托中科深谷CSPACE异构协同智脑系统,聚焦空地协同无人系统开展研究开发。首先,采用领导跟随法开展多智能体编队控制研究,该策略将多机器人系统划分为领航者机器人和跟随者机器人两部分。该研究选用距离-角度策略开展领航-跟随编队控制。具体实施时,系统维持相邻智能体间的期望距离和角度关系,达成编队控制目标。该策略的结构如图2所示。
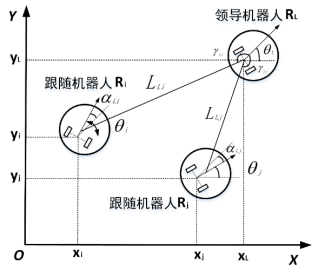
图2 领航跟随模型
为了保证机器人系统在复杂的动态环境中安全稳定地运行,必须考虑避障问题。不仅包括外部的避障,也包括编队内部的防碰撞。人工势场法(APF)作为一种基于虚拟力场的避障策略,通过构建目标点引力场与障碍物斥力场的叠加模型,驱动机器人沿势场梯度方向运动。该方法将环境抽象为动态势场空间,利用引力函数与斥力函数的矢量合成来控制移动机器人沿着连续平滑的路径运动。机器人在人工势场的受力示意图如图3所示。
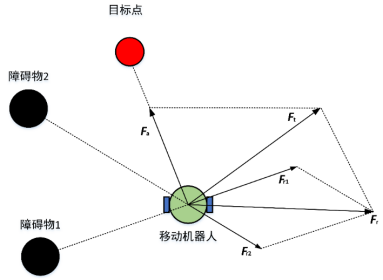
图3 机器人在人工势场的受力示意图
传统人工势场法存在目标不可达和局部最优的问题。对于目标不可达问题,引入机器人到目标点距离项来削弱目标点附近障碍物的势场强度,从而使机器人在朝着目标点运动的过程中所受到的总的势能保持减小。图4和图5展示了优化前后目标点处的势场大小。
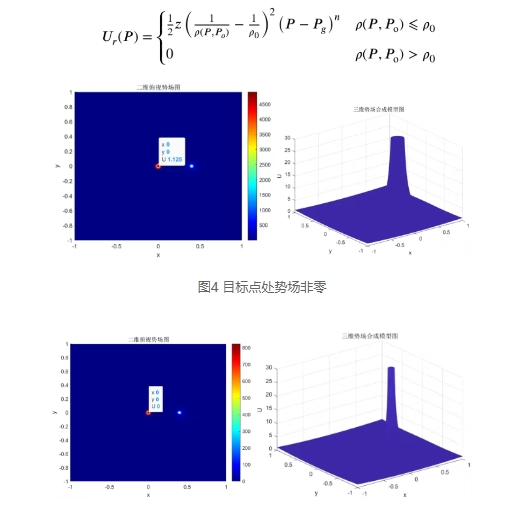
图5 目标点处势场为零
当移动机器人在虚拟势场中所受到的引力与斥力大小相等、方向相反时,移动机器人处于受力平衡状态,就会出现局部最优值情况。通过引入具有方向随机性的可控扰动分量,重构目标引力场的梯度分布特性,引导机器人沿扰动分量产生的附加梯度方向脱离局部极值区域,从而实现障碍物约束环境下的极值点逃脱。

式中,作用为目标距离增加会导致目标吸引力增强,为具有不确定方向的时间动权重因子,当机器人未到目标点且速度降低到某个区间并保持一段时间时,帮助其逃离局部最优点。
为了模拟实际场景中使用多机器人执行目标巡逻和环境数据采集等任务,设计了多机器人编队保持和目标点遍历仿真以及编队避障仿真。利用Matlab2022b 和 ROS/GAZEBO 进行联合仿真,使仿真效果更加直观地展示。仿真结果如下。
编队保持与目标点遍历实验
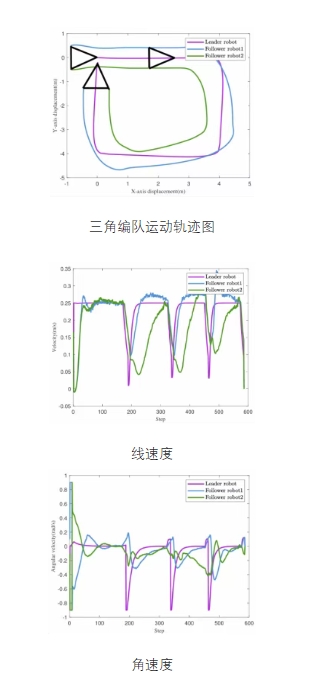
图6 编队保持与目标点遍历实验结果图
编队保持与避障实验
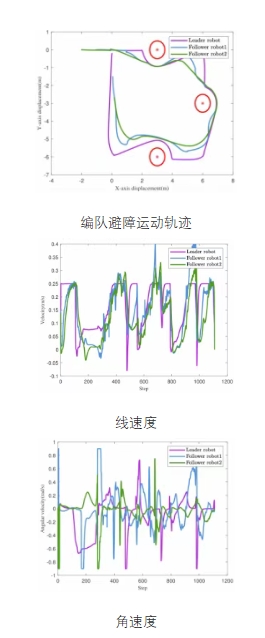
图 7 编队保持与避障实验结果图
空地协同无人系统在动态环境中运动时面临多种不确定性,如风力干扰、负载突变、通信时延抖动以及跨域运动干涉等复杂因素,这些非线性干扰对系统整体建模与协同控制会产生较大影响。文章基于Udwadia-Kalaba(U-K) 方程的约束跟随控制方法的理论,在无约束的U-K方程中引入广义约束力,对无人机-无人车空地协同控制系统进行动力学建模与分析;随后,将空地协同控制任务进行问题描述,并划分成多个控制任务,将被控系统需要遵循的约束描述为伺服约束的形式,建立约束跟随误差,考虑空地协同控制系统控制过程中的不确定性问题,提出了一种基于约束跟随的鲁棒控制器。最后,基于实用稳定性理论,分析并证明在所设计控制器下系统误差的一致有界和一致最终有界,进而保证空地协同无人系统在抵抗外部扰动时表现出较好的系统稳定性。
仿真结果
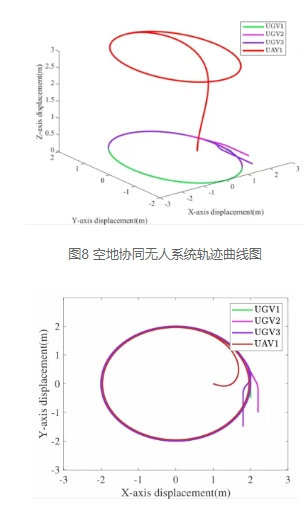
图9 二维俯视轨迹图
最后搭建空地协同无人系统实验平台,重点设计跨域机器人集群通信组网系统和地面多移动机器人协同定位系统。基于所搭建的异构通信架构和高精度定位系统,在真实的物理环境中对本文所提出的编队控制算法和避障算法进行实验验证。
MQTT(Message Queuing Telemetry Transport)是一种轻量级、基于发布-订阅模式的消息传输协议,适用于资源受限的设备和低带宽、高延迟或不稳定的网络环境。使用MQTT函数搭建虚拟客户端实现与服务器的通讯。所设计的通信系统主要由三部分组成:笔记本、路由器和智能体系统。将搭建的算法和服务器全部部署在笔记本上,服务器充当消息发送和智能体系统监测的角色。

图10 通信系统
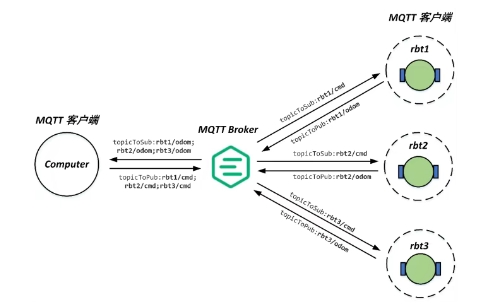
图11 MQTT通信流程
空地无人系统协同控制实验
为了更贴近实际应用场景,采用虚幻引擎构建了具有战场环境特征的虚拟实验场景。对于智能体的选取,保持和数值仿真的一致性。通过虚幻引擎蓝图系统完成虚拟环境坐标系校准,随后为每个智能体配置运动属性模块,使其可以接收控制算法产生的速度信息,同时需要实时反馈在虚拟世界中的位置坐标。

图12 虚拟环境下通信系统搭建
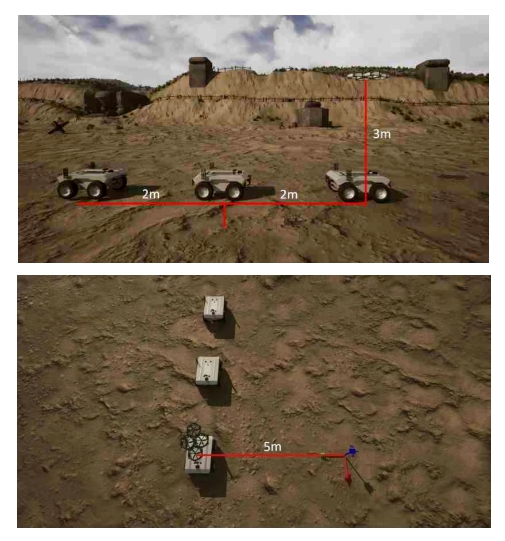
图13 虚拟环境下机器人初始位置设定
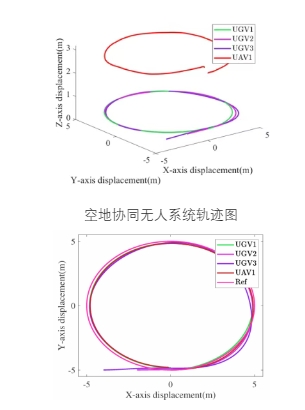
图14 空地协同控制实验结果图
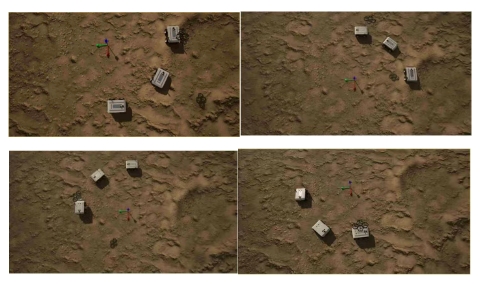
图15 空地协同控制实验阶段图
从上述实验结果可以看出,所设计的空地协同无人系统约束跟随控制器可以实现无人车轨迹跟踪、无人车之间避碰和空地协同控制三种任务,对于环境干扰控制器展现出一定的鲁棒性。
开源智脑系统高效赋能科学研究
中科深谷CSPACE异构协同智脑系统构架采取大模型、多模态感知、实时决策、建模与仿真和物理执行等,可以让智能体与物理环境动态实时信息交互,实现自主学习、决策与行动。系统以模块化、开放性为特点,用于解决智能体对环境和任务的建模、仿真、自主决策、自主控制过程,除了能控制单个智能体对象完成作业任务外,还具备群体智能控制能力,可以让更多的智能体融合到一起,开展分工协作任务。
CSPACE智脑系统可为科研探索提供高效、可靠且通用便捷的综合性解决方案,有效助力前沿技术研究与创新突破。欢迎详细咨询!


