

核心期刊发表 | 中科深谷设备助力机械臂控制研究结硕果
发布日期:2025-08-02 浏览次数:185
新疆大学陈涛博士团队近期在机器人控制研究领域取得重要进展,其关于六轴机械臂先进运动控制的核心成果,已连续发表两篇文章于核心期刊中。该研究聚焦提升机械臂在复杂任务中的控制性能,依托中科深谷CSPACE开源异构协同智脑系统开展研究,全程基于深谷六轴机械臂平台开展实验验证。
深耕核心算法:高精度轨迹跟踪控制成果丰硕
研究团队致力于解决六轴机械臂应用中的关键控制难题。已发表的两篇论文,分别深入探讨了积分增强型控制方案及迭代学习融合方案。前者通过嵌入式积分项实现“即时纠偏”,在动态场景下精度更高;后者则依赖任务重复性实现“渐进优化”,在长期重复任务中误差抑制能力更强。这些成果为机械臂在精密操作等场景的应用提供了有力的技术支撑。
开源平台赋能:中科深谷六轴机械臂提供坚实实验基础
研究中使用的核心硬件平台——中科深谷六轴机械臂,为团队验证理论算法提供了可靠的实验载体。该机械臂具备开放的控制协议和详细的模型参数,这一特性为团队的研究带来了显著便利。研究人员能够基于开放的接口,高效地进行深度二次开发。团队负责人陈涛博士表示:“我们的研究主要聚焦于农业领域,深谷六轴机械臂可以便捷地适配和集成不同的农业末端执行器,从而可以将控制算法快速落地到实际应用场景进行验证和优化,具有极高的实际应用拓展价值”。

高效研发闭环:深谷CSPACE智脑系统深度赋能
中科深谷核心产品CSPACE开源异构协同智脑系统,具备模块化、开放性特点,可实现机器人“大小脑协同”控制,解决智能体对环境与任务的建模、仿真、决策与控制问题,为科研提供高效、可靠、通用的综合解决方案。

图:智脑系统产品矩阵
研究过程中,智脑系统为团队构建了从理论到实践的快速验证通道——它集合了 ROS、MATLAB、Simulink 等工具链,通过智脑系统,团队成员可在仿真环境中高效训练和优化控制策略,并通过Sim2Real技术无缝迁移到实体机械臂,这大大降低了实验试错成本,提升了整体的研究效率。
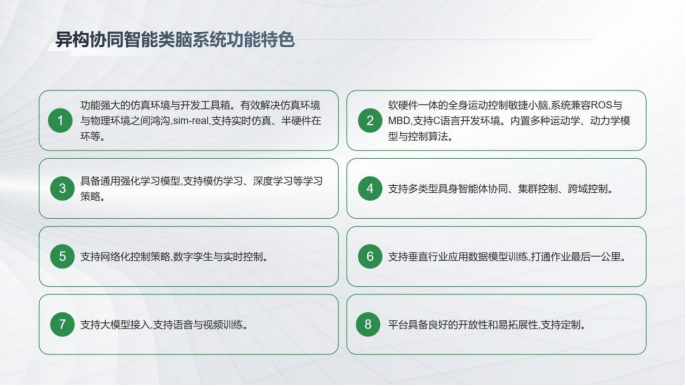
图:智脑系统功能特色
陈博士补充道:“深谷智脑系统还显著提升了研究成果在实际农业场景中的适应性”。智脑系统“大小脑”协同控制设计,集成强化学习、深度学习算法及多种控制策略,面对农业生产等复杂场景,可以通过与环境动态交互提升自身任务执行能力。
无忧售后:工程师全程协助解决技术挑战
科研探索并非一帆风顺,在研究推进的关键阶段,陈涛团队曾遭遇复杂环境感知噪声、作业路径规划出现干涉等技术难题,中科深谷及时、有效的售后服务让团队成员颇为感动。“工程师们全程在线。遇到问题询问他们,很快就能得到响应与协助,远程协作帮助我们分析问题、优化系统配置,克服实验困难,确保了研究工作的顺利开展”。
陈涛博士团队的科研成果彰显了中科深谷设备在支撑高水平科研中的核心价值。目前,深谷已累计赋能发表高水平科研成果千余项,科研专利100余项,服务高校科研院所600余所。未来,深谷将继续以CSPACE开源异构协同智脑系统等核心产品,为高校及科研机构的前沿探索,持续提供高性能、开放化、智能化的技术平台与专业高效的服务保障。


