

如何让下肢助力外骨骼机器人“读懂”人类动作,实现“人机协同”?
发布日期:2025-08-04 浏览次数:453
随着工业自动化与智能化进程加速,现代工业生产、物流运输及应急救援等场景对作业灵活性提出更高要求。这些场景中任务复杂多变,需要劳动者快速响应突发状况,但高强度负荷易导致人体疲劳损伤。传统工业机器人虽擅长重复性任务,却难以适应非结构化环境;人类工作者具备决策灵活性,但受限于生理机能难以持久负重。
在此背景下,下肢助力外骨骼机器人成为突破困境的新思路——它通过精准识别运动状态并动态提供助力,显著降低人体负担,为高负荷作业场景提供全新解决方案。
研究团队基于深谷CSPACE开源智脑系统开展研究,打造了一款贴合人体运动特性的高性能下肢助力外骨骼机器人。
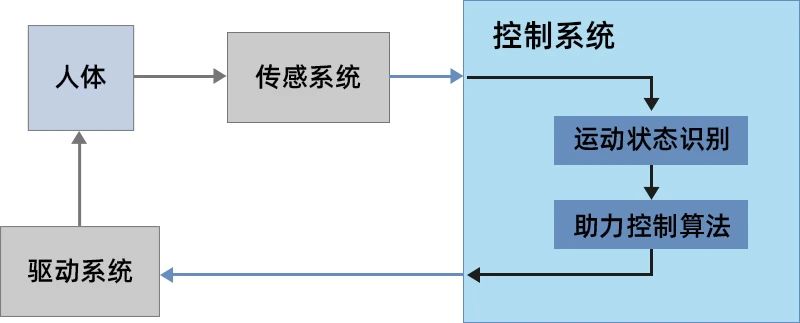
图:下肢助力外骨骼人机协同系统组成
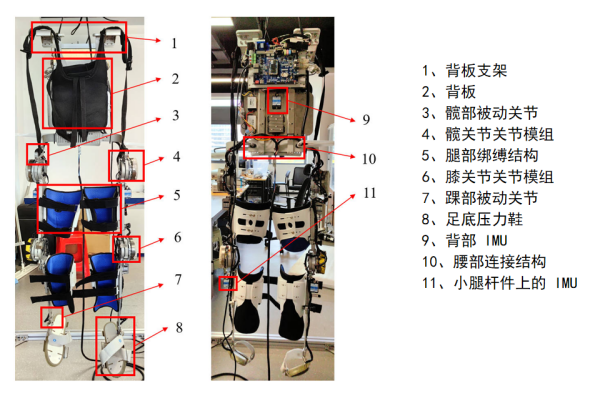
图:下肢助力外骨骼机器人关键部件
下肢助力外骨骼机器人系统设计
团队细致研究人体下肢生物力学结构,剖析髋、膝、踝等关节在不同运动状态下的活动范围、轨迹及协同规律,据此精心为机器人配置契合人体自然运动规律的合适自由度与杆长参数。
同时,团队着眼于精准控制需求,构建了一套完备的传感系统——集成 IMU 传感器以实时监测运动姿态与加速度,关节力矩传感器精确测量关节受力,关节绝对值编码器准确获取转动角度,足底压力传感器感知压力分布,同时搭建以电机驱动的高效驱动系统,确保动力输出精准及时。
硬件上,选用高性能、高稳定性控制板,依据通讯协议与电气要求搭建控制系统,实现各部件协同工作;软件上,用基于模型设计(MBD)方法开发软件平台,提升开发效率并实现软硬件深度集成。
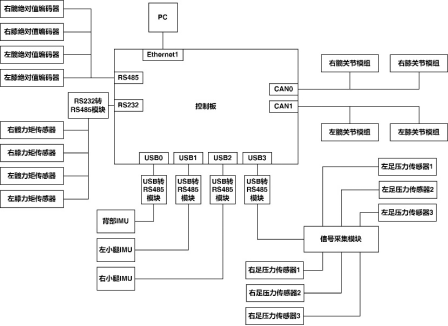
图:控制系统设计
运动学与动力学建模研究
为深入理解外骨骼机器人的运动特性与力学规律,该研究进行了系统的建模分析:
► 运动学建模:该研究在运动学方面运用改进 DH(Denavit - Hartenberg)法,针对外骨骼机器人在矢状面内的简化模型展开细致建模工作。通过严谨地定义连杆坐标系和参数,精确描述各连杆之间的相对位置和姿态关系,进而成功推导出正运动学方程,该方程能够根据关节变量准确计算出外骨骼机器人末端执行器在矢状面内的位置和姿态信息。在此基础上,进一步求得雅可比矩阵,它建立了关节空间速度与操作空间速度之间的映射关系,为后续的控制算法设计和运动性能分析提供了关键依据。
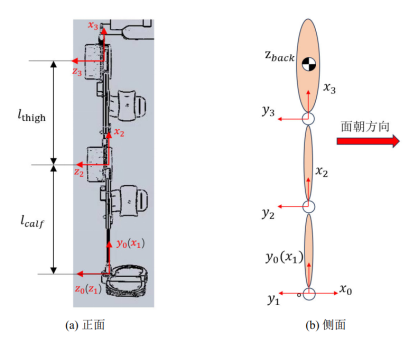
图:改进DH法连杆坐标系建立示意图
► 动力学建模:而在动力学研究方面,研究采用拉格朗日法,对外骨骼机器人的下肢系统进行全面且深入的动力学建模。该方法从能量角度出发,充分考虑了外骨骼机器人的质量分布、惯性特性以及关节间的相互作用力等因素。经过一系列复杂的数学推导,最终得出精确的动力学方程。该方程能够准确描述外骨骼机器人在运动过程中各关节力矩与关节变量、速度、加速度之间的动态关系,为外骨骼机器人的精准控制、动力优化以及稳定性分析等奠定了坚实的理论基础。
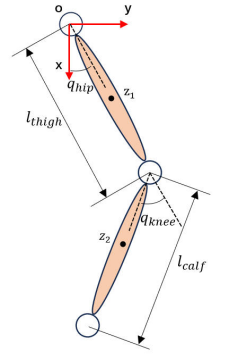
图:动力学建模
运动状态识别方法开发与验证
动作特征分析
深入剖析代表性动作(如蹲起)的肢体协同变化、关节角度变化及肌肉力特征;同时对行走步态的周期性规律展开全面分析,明确其步态周期内不同阶段(如支撑相、摆动相)的特征以及各阶段之间的转换关系。
数据采集与处理
利用传感器采集多维运动数据。针对关键数据(如编码器角速度值、足底压力值),采用改进均值滤波方法进行预处理,有效去除噪声干扰,更有效地保留数据的真实特征。
状态识别方法
基于上述分析,研究团队创新性设计了一种基于状态机切换的运动状态识别方法,该方法能精准识别人体主体运动状态(站立、蹲起、行走)并细分行走步态相位(支撑相、摆动相等)。
◎ 实验验证:为验证所设计方法的有效性和准确性,利用穿戴实验进行验证,在真实运动场景下对不同受试者进行测试。结果表明,主体运动状态识别准确率高,行走步态相位识别方法有效可靠,为下肢外骨骼的精准助力控制提供了关键技术支撑。
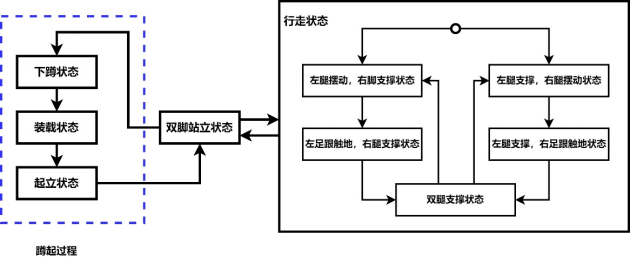
图:运动状态识别的状态机
精准助力控制策略
为使下肢助力外骨骼机器人适配不同运动状态并提供精准助力,研究设计了针对性控制方法:
针对蹲起运动:采用基于虚拟模型控制(VMC)的策略,在算法中设置垂直与水平方向的虚拟力以模拟人体蹲起外力,基于欠驱动系统约束求得虚拟力矩,再借助雅可比矩阵将虚拟力映射到关节空间,驱动关节产生相应助力。
针对行走运动:设计基于零力拖动和导纳的控制算法,零力拖动可抵消腿杆重力、减小关节摩擦影响,使腿杆更轻盈,导纳控制则依据不同步态相位设置不同导纳参数,支撑相增大参数以增强刚度、不易屈腿,迈腿相减小参数提升柔顺性、便于推动腿杆。
为验证控制方法有效性,运用 Simscape 软件对蹲起和行走控制进行仿真,结果显示二者分别能满足对应运动状态的助力需求,最后通过穿戴实验模拟搬运等实际场景,进一步证明该控制方法在实际应用中可有效增强人体运动能力、减轻疲劳。

图:实际穿戴效果
研究团队基于深谷CSPACE开源智脑系统,成功设计开发了一款高性能下肢助力外骨骼机器人样机。通过深入的运动学与动力学建模、创新的运动状态识别方法以及针对性的精准助力控制策略,有效解决了高负荷作业场景下人机协同的关键技术难题。实验证明,该外骨骼系统能显著减轻人体负担、提升作业能力。
未来,研究工作将聚焦于系统的轻量化、智能化水平提升以及多场景下的规模化应用验证,以推动下肢助力外骨骼技术在工业、物流、救援等领域的广泛应用,为劳动者提供更安全、高效的支持。
深谷开源智脑系统高效赋能科学研究
中科深谷CSPACE异构协同智脑系统构架采取大模型、多模态感知、实时决策、建模与仿真和物理执行等,可以让智能体与物理环境动态实时信息交互,实现自主学习、决策与行动。系统以模块化、开放性为特点,用于解决智能体对环境和任务的建模、仿真、自主决策、自主控制过程,除了能控制单个智能体对象完成作业任务外,还具备群体智能控制能力,可以让更多的智能体融合到一起,开展分工协作任务。
CSPACE智脑系统可为科研探索提供高效、可靠且通用便捷的综合性解决方案,有效助力前沿技术研究与创新突破。欢迎咨询!


