深谷商城
首页
走进深谷
企业介绍
品质服务
新闻中心
人才招聘
联系我们
核心团队
产业分布
核心部件与工业智能
民生智能
智能制造
农业智能
康养智能
深谷教育
科技投资与产业孵化
共性技术研发中心
产品中心
伺服驱动技术
视觉与深度学习技术
导航技术
半实物仿真与控制技术
智能机器人集成技术
深谷工程师学院
开源开放的人工智能与机器人专属学习平台
学院介绍
人才培养
师资团队
合作高校
交流中心
课件学习
交流中心
科普教育
会员论坛
MEMBER FORUM
欢迎您:
登录
注册
发帖
不限
知乎大神
CSDN推荐
知名博主
知名高校
知名企业
Matlab中文论坛
Ros社区
0
知名博主
2021-05-28 16:52:53 | 13966603248 | 0 回复
首页
上一页
1
下一页
尾页
深谷动态
人形机器人如何实现在非结构化环境中“应对自如”?
西南民族大学电子信息学院党委副书记商健、副院长向伟、通信工程系主任邓彦松一行莅临中科深谷考察交流
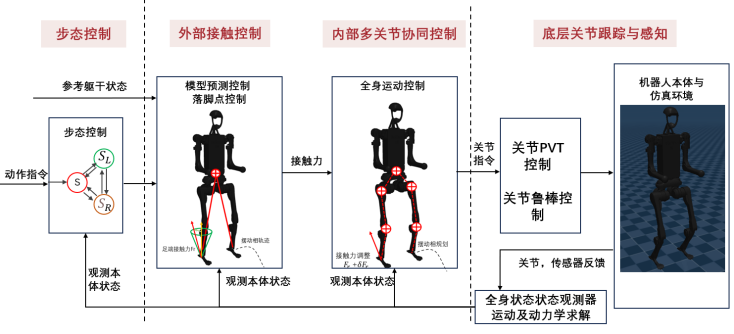
从建模到控制,如何让人形机器人“走稳每一步”?