

深谷产品 | 中科深谷开源桌面6D并联机器人应用于实践教学中的探索
发布日期:2021-11-15 浏览次数:2906
随着技术的日益成熟以及应用的不断普及,工业机器人已开始逐渐融入社会生产,并发挥出越来越不可替代的作用。工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是在危险、恶劣环境下的作业。其中并联机器人与串联机器人是工业机器人不可分割的两个重要组成部分。
1. 什么是并联机器人
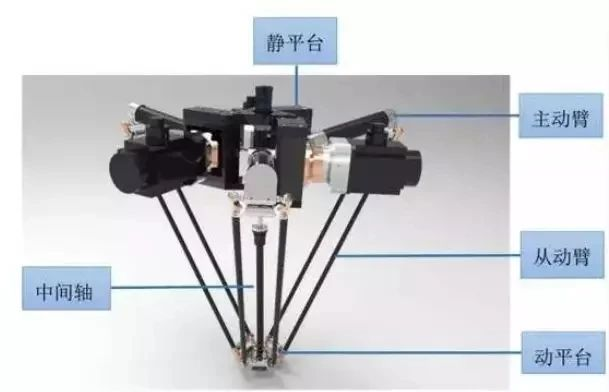
并联机构(Parallel Mechanism,简称PM),可以定义为动平台和静平台(定平台)通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
其特点有:结构紧凑,刚度高,承载能力大;无累计误差,精度高;占用空间小;速度快,运动性能佳,部件磨损小,寿命长。
六自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得最多的并联机构,中科深谷6D并联机器人广泛应用于各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、动感娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。
开源桌面6D并联机器人如何应用于实践教学
机器人技术是高等教育自动化专业的一个重要的研究方向,集中了机械工程、电子技术、检测技术、通信技术、计算机技术、自动控制理论以及人工智能等多学科领域的最新研究成果,是当今科学技术发展最活跃的领域之一 ,因此,以机器人作为研究对象开展实践教学具有非常重要的意义,有利于开拓学生视野,从系统的角度培养学生对综合知识的运用,提高学生的科学素质。

从机器人教学角度来看,中科深谷并联机器人系统提供机器人建模仿真、运动学逆解等实验案例,并针对实验案例,提供相应的开源算法,可以满足高等院校、科研机构在传动及控制技术领域的教学科研等工作。
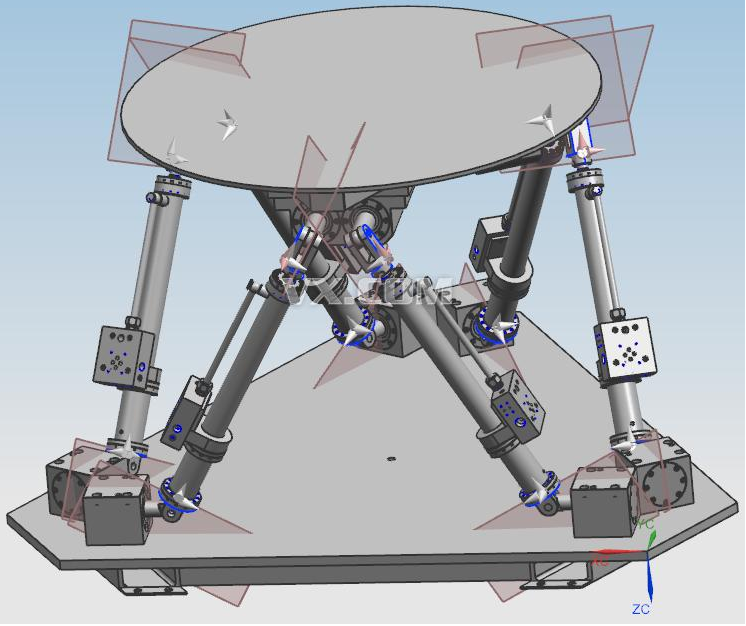
Simscapae建模图
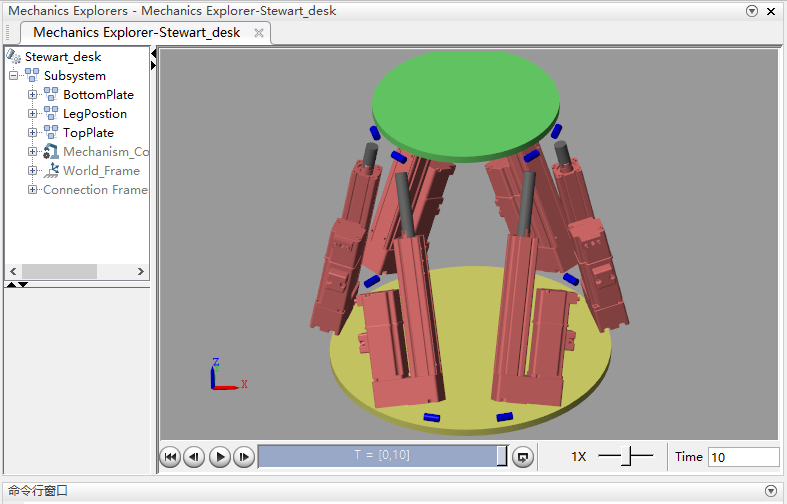
Simscapae仿真图
另一方面,该机器人可以实现复杂的高精度抓取控制,配合视觉系统等辅 助设备可以实现高复杂度的综合性和创新性实验。因此,中科深谷并联机器人是开展机器人及其相关课程教学的很好平台。

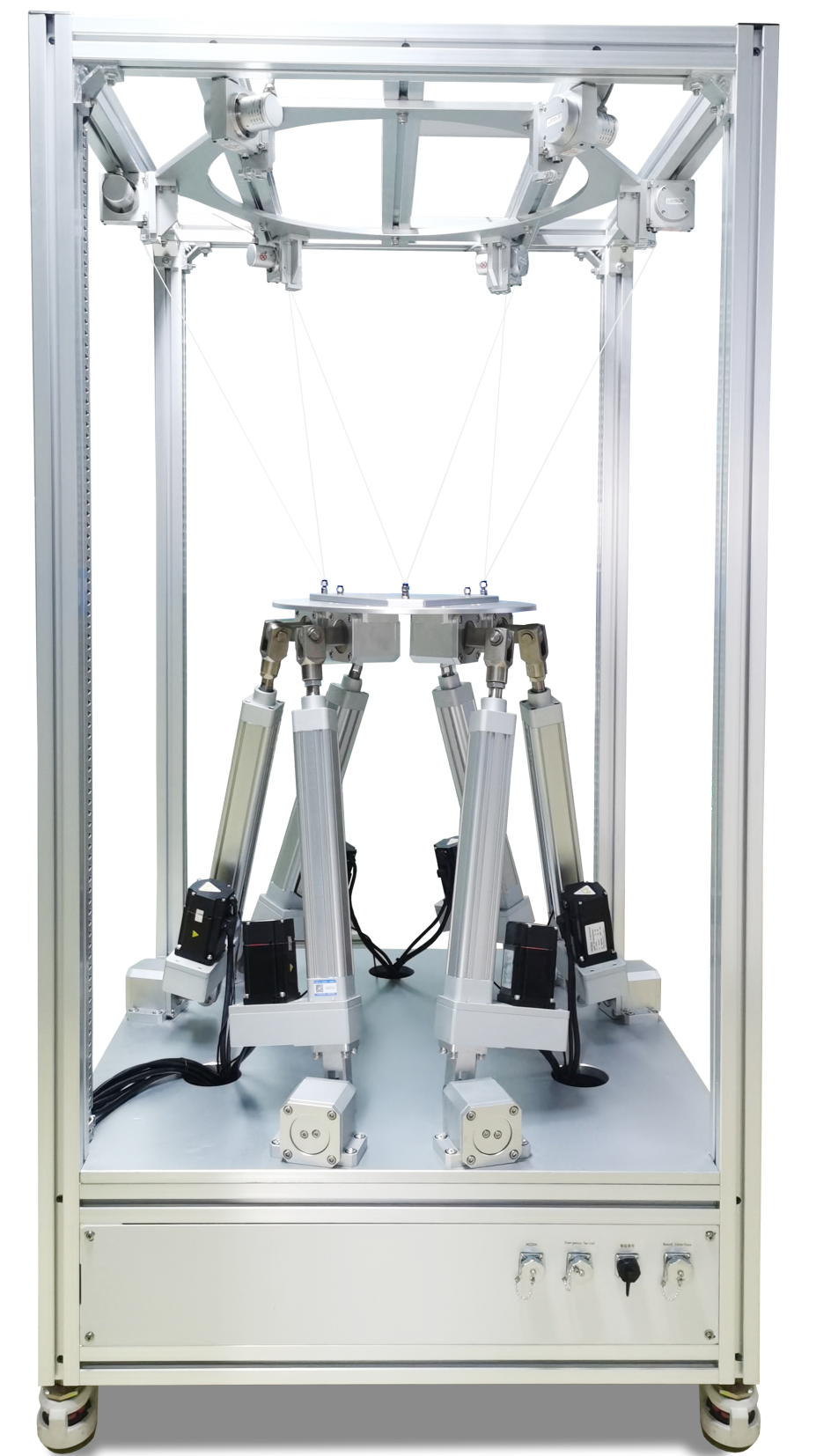
结合教学和科研需要,中科深谷自主开发开源桌面6D并联机器人系统该系统硬件上由由六支轻型可伸缩电动缸、上下平台以及上下各六只万向节组成。 机械结构采用轻便化设计,占地面积小,重量轻,可安装于实验台上。
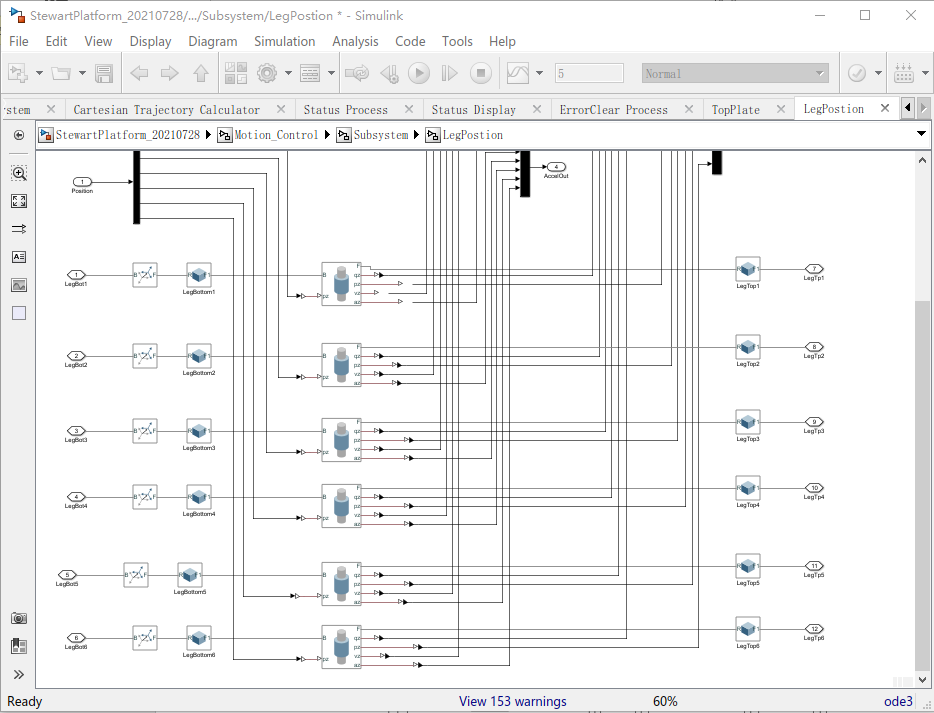
机器人运动学软件部分采用 MBD(Model-Based Design)开发方式,并以图形化的建模工具 MATLAB/Simulink 对复杂的逻辑进行设计、分析、仿真、开发。提供底层伺服开源的算法及实验案例,支持用户进行电机算法研究以及二次开发,最大程度满足高校各专业的教学科研需求。
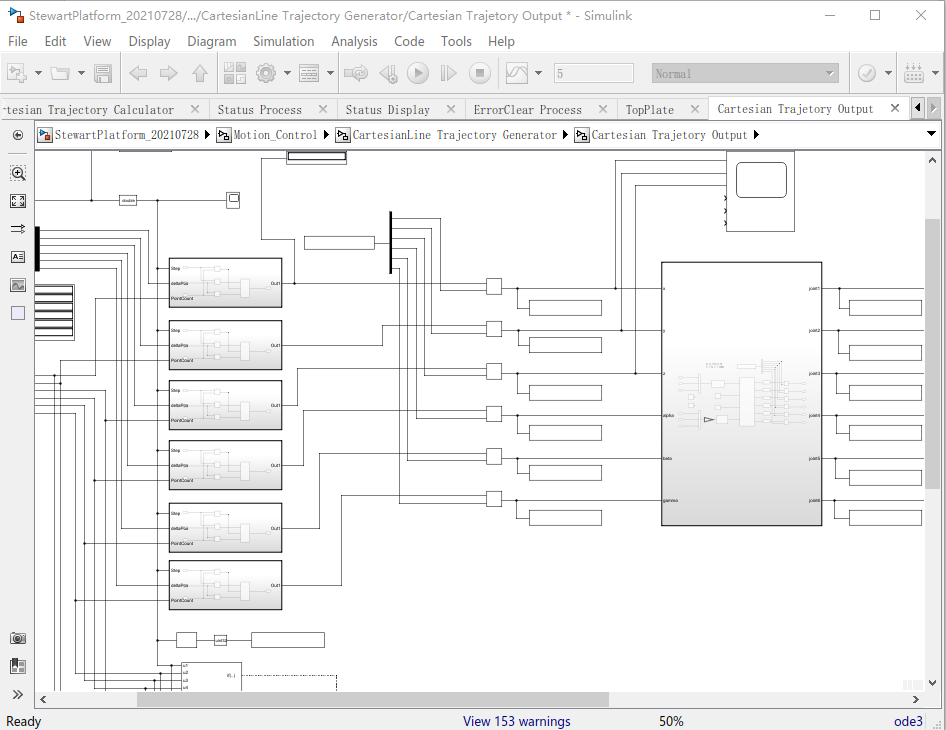
Simulink逆解控制图
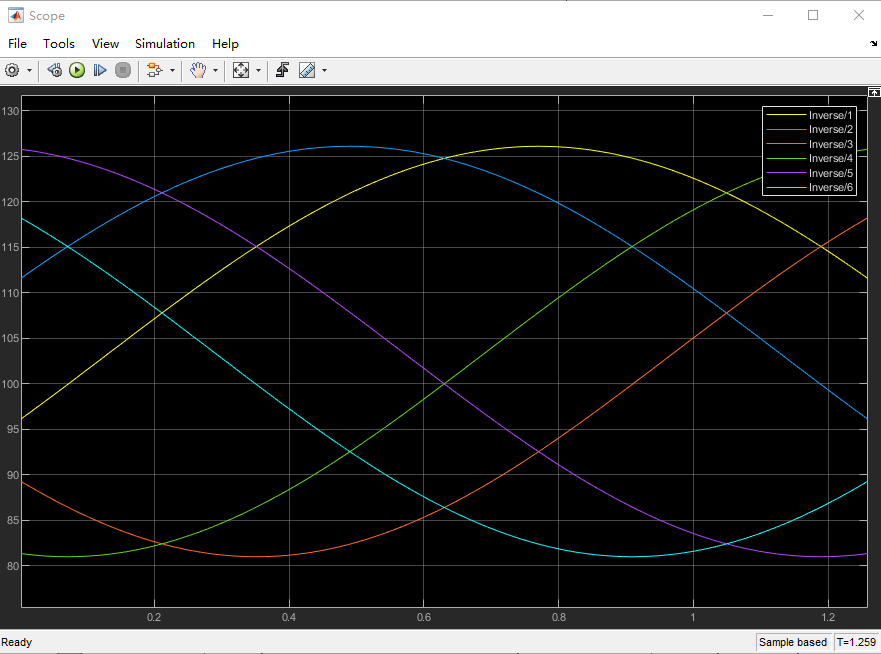
Simulink仿真图
通过六支电动缸的伸缩运动,完成上平台在空间六个自由度(x,y,z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态,可在一套系统上实现建模、仿真、实时控制并三维 物理模型动态显示。
Simulink模型图
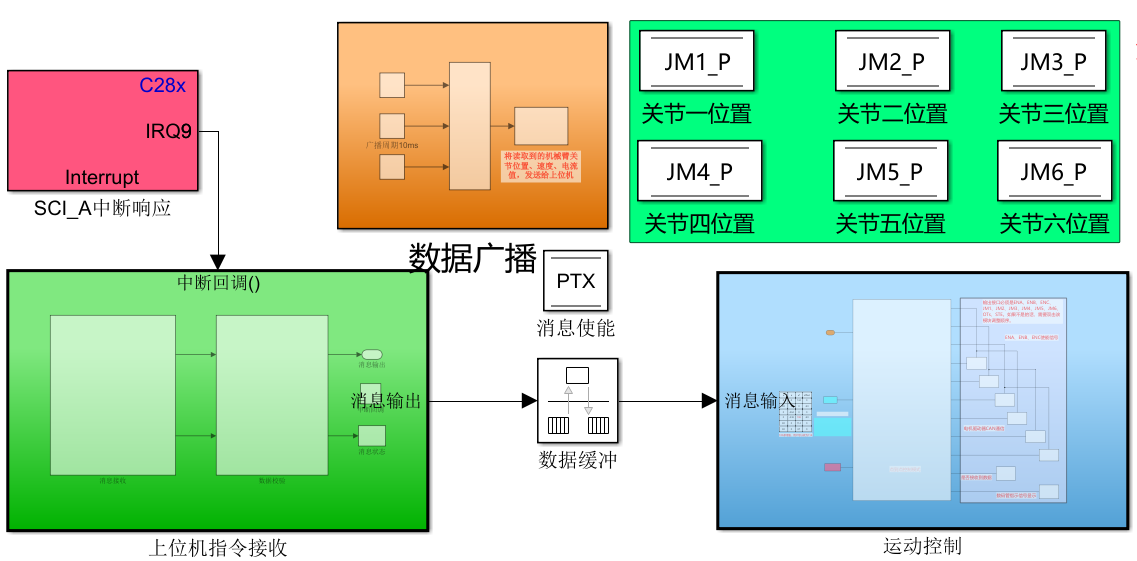
同时系统配备人机交互界面友好的上位机软件系统,可进行机器人运动控制及实时位姿反馈,支持数据波形显示观测、记录、在线修改以及其他自定义控制命令下发。

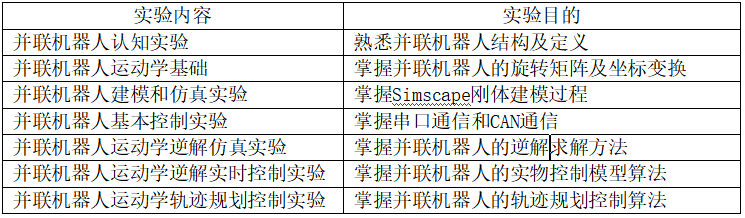
教学实验内容
在日常发教学中,中科深谷开源桌面6D并联机器人课支撑下列所有实验,所有实验程序均在MATLAB/Simulink中编写,所有程序源代码均开放,可以自由修改。
本科和研究生教学课程
1. 机器人学
2. 机器人建模与仿真
3. 机器人操作系统
4. 计算机控制技术
支持科研方向
1. 并联机器人正解算法研究
2. 并联机器人速度加速度研究
3. 并联机器人应用
4. 并联机器人建模研究
5. 并联机器人控制研究
实际项目应用
目前中科深谷开源桌面6D并联机器人在安徽工业大学国合基地与省重点实验室平台建设项目中成功验收,相信未来该设备在安徽工业大学教学于科研中会发挥更大的作用,赋能安徽工业大学工程人才培养。



