

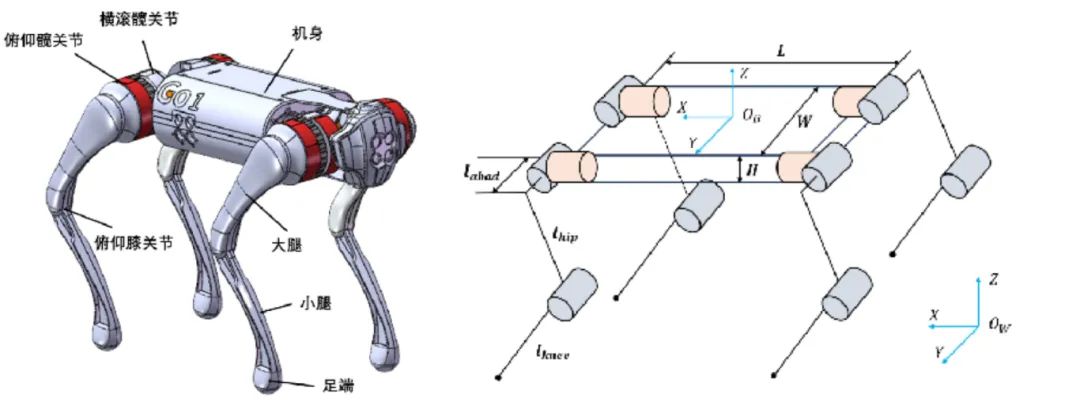
- 强化学习如何让机器狗在多种地形环境中实现稳定步态?
- 2025-07-17
- 随着智能制造与新能源领域无人化进程加速,传统轮式机器人在复杂地形中的局限性日益凸显。四足机器人凭借其仿生腿部结构展现出显著优势:相较于轮式平台具有更强的地形适...
- 查看详情 >

- 如何让机器人“心有灵犀”,实现空地异构无人集群协同控制?
- 2025-07-08
- 随着通信网络技术,环境感知技术,无人系统控制和决策等多智能体协同控制技术取得突破性进展,智能无人集群系统得到了深入研究。跨域协同是智能无人集群系统形成颠覆性能...
- 查看详情 >

- 聚焦具身智能!2025深谷工程师学院师资研修班即将来袭!
- 2025-07-01
- 当面对环境未知、任务多变、设备异构的复杂作业场景时,如何让智能体像人类一样感知环境、自主决策并精准执行复杂任务,已成为全球科技界...
- 查看详情 >
- 揭秘具身智能前沿技术,“深谷开源智脑系统赋能科研”专题分享硬核开启!
- 2025-06-21
- 如何让机器人拥有“人类思维”,学会自主感知、决策、行动以及协同合作,甚至像人类一样适应复杂环境? 这不...
- 查看详情 >
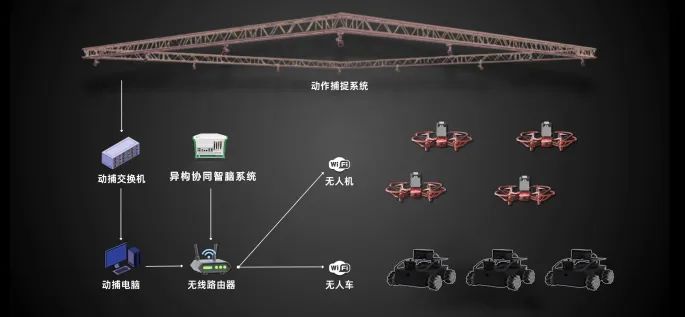
- 深谷开源室内空地协同无人集群系统,实现异构智能体跨域协同控制
- 2025-06-17
- 跨域智能无人集群系统是由多个不同种类、不同功能、分布在不同物理域的无人平台组成的群体系统,通过信息交互、智能决策与协同控制,可共同完成单一平台或单一域平台难以...
- 查看详情 >


